
Evaluation of maneuvering target detection performance based on measured data
-
摘要:
基于TTP准则的静目标鉴别性能理论模型评估方法具有环境适应性强、性能预测准确、系统参数优化便利等优点,但此方法对动目标探测性能评估的准确性还需展开进一步研究。为了准确评估动目标的探测性能,文中搭建了靶标运动系统、红外目标生成系统和目标采集及储存系统;采用人眼阈值判断实验方法实现不同成像作用距离、不同运动速度、不同靶标尺寸下的目标探测性能评估,获得了目标探测概率性能曲线;结合NVThermIP现场性能评估理论模型,在系统性能参数输入一致时计算目标探测性能。实验结果表明:NVThermIP现场性能预测模型对于动目标探测性能的预测存在一定偏差,在实验测量的目标运动速率范围内,随着目标运动速率的提升,目标更易被探测。实验结果为动目标性能评估理论模型的修正提供了数据支持。
-
关键词:
- 动目标探测性能 /
- NVThermIP理论 /
- 人眼阈值判断 /
- 性能评估理论模型
Abstract:The theoretical model evaluation method of static target discrimination performance based on TTP criterion has advantages of strong environmental adaptability, accurate performance prediction and convenient system parameter optimization, but the accuracy of this method in evaluation of moving target detection performance needs to be further studied. In order to accurately evaluate the detection performance of moving targets, the target motion system, infrared target generation system, target acquisition and storage system were established. The experimental method of human eye threshold judgment was used to evaluate target detection performance at different imaging distances, different motion velocities, and different target sizes, and the target detection probability curve was obtained. According to the NVThermIP theoretical model for field performance evaluation, the target detection performance was calculated when the input of system performance parameters was consistent. The experimental results show that the NVThermIP evaluation model has certain deviation for detection performance prediction of moving targets. In the range of target motion rates measured by experiment, the target is easier to detect with the increase of the target motion rate. Research results provide data support for the revision of theoretical model of performance evaluation of moving targets.
-
引言
光电成像系统在军事上占有举足轻重的地位,广泛应用于侦察、跟踪、预警和对抗等领域。随着红外成像系统工艺、结构及设计技术的不断提升,针对新一代红外成像系统性能评估方法的优化对系统论证、设计及分析的准确性提出了更高的要求。鉴于实验法和半实物仿真法具有复杂多变环境适应性差,经费需求高,难以实现系统性能预测和参数优化等缺点[1-2],基于性能理论模型的光电系统评估方法可打破上述技术难点,实现光电系统性能评估及优化设计,并有助于系统性能分析,对精准评价红外成像系统性能预测具有指导意义。
在美国陆军通信电子指挥部夜视电光中心(NVESD)研发的一系列红外成像系统静态性能模型基础上,基于性能模型评价方法,利用最小可分辨温差(MRTD)作为成像质量衡量指标,结合人眼视觉响应特性,对不同任务等级下的系统作用距离和探测概率进行判定[3]。西安应用光学研究所和兵器试验中心等单位针对红外成像系统最小可分辨温差影响因素进行了研究[4-6],分析了不同大气条件下成像系统的性能。为了适用新型红外成像系统的性能表征,传统MRTD性能模型无法保持稳定测量,且观测者主观性对实验测试结果影响较大[7],荷兰TNO研究所以约翰逊准则为基础,提出了三角形方位辨别阈值性能模型(TOD),此模型以不同尺寸、对比度及方向的标准三角形样条作为目标,通过辨别目标方向确定鉴别阈值对比度[8-9]。此方法忽略了系统最高空间分辨率以内的传递特性,无法对焦平面探测器及数字图像处理系统性能进行准确评估。为了定量化研究人眼对性能评估模型的影响,TTP(target task performance)准则引入了系统对比度阈值函数量化人眼视觉,进一步提升了性能模型的预测准确度[10-11]。基于TTP准则的NVThermIP模型作为军事、工业及工程上的重要性能评估准则,具有较高的稳定性、一致性与可靠性[12-13]。为了进一步提升经典光电系统性能评估模型的精度,多位研究人员对性能评估模型进行了修正[14-15]。但上述静态性能模型无法满足运动目标探测性能的准确评估。因此,在上述经典性能模型的基础上,出现了对运动目标探测距离、探测概率等特性进行评估的研究,并在实验中取得了相应的验证[16-17]。但这些研究仍存在较大不足,动态性能模型没有提出完善的探测准则,难以实现动目标的精准探测。
为了探讨运动目标的精准探测评估,文中搭建了运动靶标系统,并通过人眼视觉对目标成像特征进行评判,计算机计算获得运动目标的探测性能曲线,并将实验结果用于NVThermIP静态性能模型的修正指导。研究结果为动目标性能评估理论模型的修正提供了数据支持。
1 基于TTP准则的NVThermIP性能评估模型
基于TTP准则的NVThermIP性能评估模型,将MRTD函数用系统对比度阈值函数进行替换,同时将Johnson准则中极限空间频率用目标对比度大于人眼对比度阈值的空间频率的积分替换,且在模型中增加了具有带通特性的Barton人眼模型,具备更高的目标成像性能评估准确度。
1.1 TTP准则思想
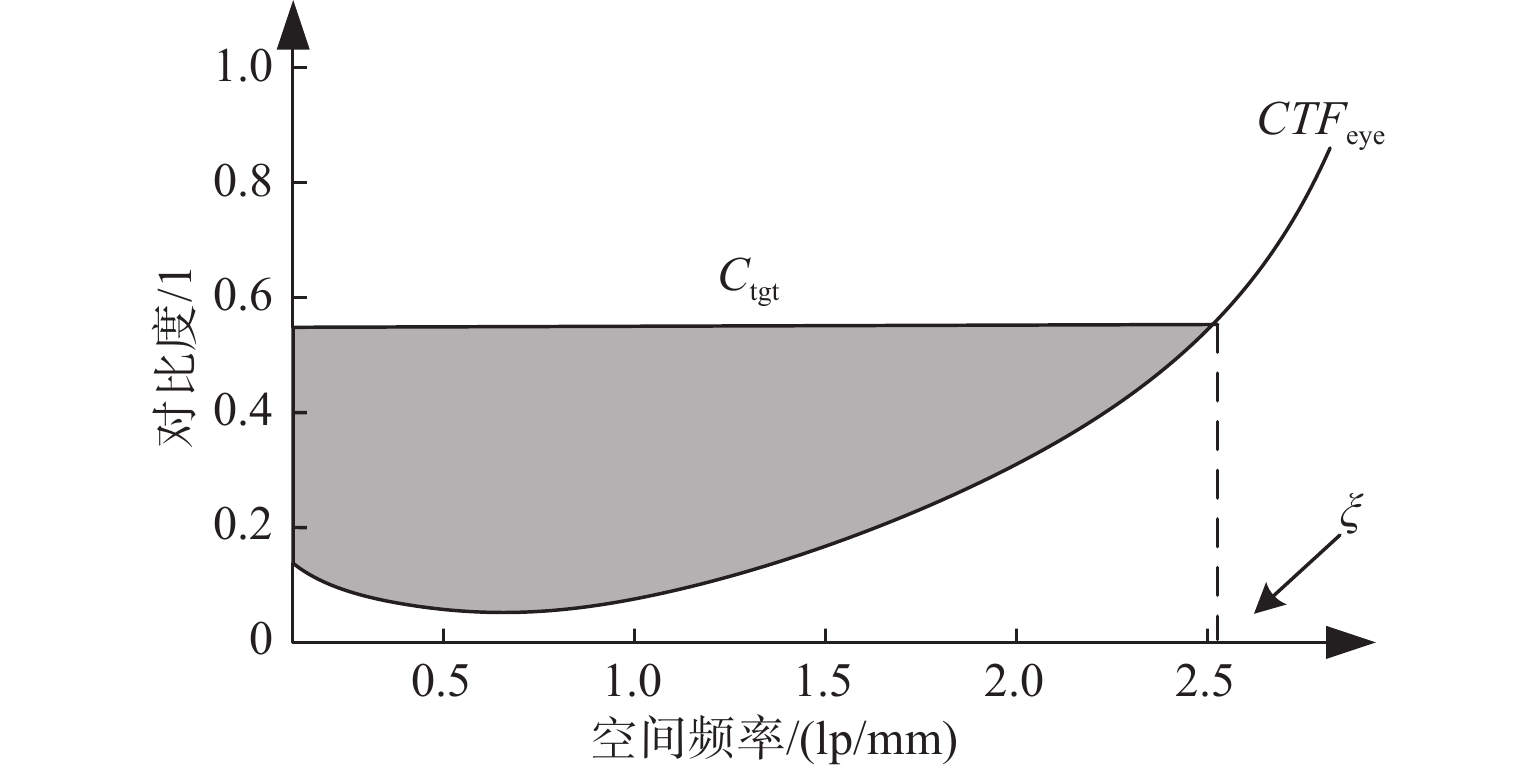
目标信号超过光电成像系统的阈值,则认为可以获取目标信息。即目标对比度(Ctgt)超过光电成像系统对比度阈值(CTFsys)的空间频率进行加权积分,取代约翰逊准则中的极限空间频率,将其作为系统获得的目标信息量。TTP准则示意图如图1所示。
TTP定义如下:
$$ {\text{TTP}} = \int_{{\xi _{{\rm{low}}}}}^{{\xi _{{\rm{high}}}}} {\sqrt {\frac{{{C_{{\rm{tgt}}}}}}{{CT{F_{{\rm{sys}}}}\left( \xi \right)}}} } {\rm{d}}\xi $$ (1) 式中:${\xi _{{\text{high}}}}$和${\xi _{{\text{low}}}}$为空间频率上、下限;${\xi _{{\text{high}}}}$为CTFsys和Ctgt的交点对应的空间频率值,单位cyc/mrad。其中Ctgt可表示为
$$ {C_{{\text{tgt}}}}{\text{ = }}\frac{{\sqrt {{{\left( {{\mu _t} - {\mu _b}} \right)}^2} + {\delta _t}^2} }}{{2{\mu _{{\text{scene}}}}}} = \frac{{\sqrt {\Delta {\mu ^2} + {\delta _t}^2} }}{{2{\mu _{{\text{scene}}}}}} $$ (2) 式中:$ {\mu _{{\text{scene}}}} $为目标临近局部背景的平均亮度;$ \Delta {\mu _t} $和$ \Delta {\mu _b} $分别为目标和背景的平均辐射亮度;$ {\delta _t} $为目标亮度的标准差。
光电成像系统对比度阈值不仅与系统噪声有关,还与系统调制效应有关。场景中的目标信号在传递过程中受光学系统、探测器、信号处理电路和显示器的空间调制,进一步受成像系统噪声及人眼内部视觉生理噪声的干扰,增加了目标特征退化模糊效果,即增加了系统在所有空间频率上的对比度阈值。模糊和噪声的影响通过假设观测者的CTF退化来建模,可表示为
$$ CT{F_{{\text{sys}}}}\left( \xi \right){\text{ = }}\frac{{CT{F_{{\text{eye}}}}\left( \xi \right)}}{{MTF\left( \xi \right)}}\sqrt {1 + {\alpha ^2}{\sigma ^2}/{L^2}} $$ (3) 式中:$ \xi $为空间频率;$ \sigma $为显示的均方根噪声;$ L $为显示器亮度,单位为cd/m2;$ \alpha $为关于噪声对亮度的校正因子,一般取169.6(假设人眼噪声与显示亮度L成正比,1/ne=α/L,ne为显示的人眼均方根噪声);MTF为系统调制传递函数,可通过测量获得。CTFeye为人眼对比度阈值函数,数学表达式如下:
$$ CT{F_{{\text{eye}}}}\left( f \right){\text{ = }}{\left( {af \cdot \exp \left( { - bf} \right)\sqrt {1 + c \cdot \exp \left( {bf} \right)} } \right)^{ - 1}} $$ (4) 式中:f为空间频率;a、b、c取值分别如下
$$ \begin{gathered} a = \frac{{540{{\left( {1 + 0.7/L} \right)}^{ - 0.2}}}}{{1 + \dfrac{{12}}{{\theta \left( {1 + f/3} \right)}}}} \\ b = 0.3{\left( {1 + 100/L} \right)^{0.15}} \\ c = 0.06 \\ \end{gathered} $$ (5) 式中:θ为表现目标角。对于一个机动目标,其尺寸通常为观测目标面积的平方根,即:
$$ \theta = \frac{{\sqrt {{A_{{\text{tgt}}}}} }}{R}M $$ (6) 式中:${A_{{\text{tgt}}}}$为目标面积;$M$为系统放大倍数;$R$为目标与传感器之间的距离。
1.2 NVThermIP模型
视觉心理试验显示了眼睛响应遵循对数正态分布,概率密度函数遵循以下分布:
$$ p\left( V \right) = \frac{1}{{\sqrt {2{\text{π }}} \lg \sigma }}\exp \left( { - \frac{1}{2}\left[ {\frac{{\lg V - \lg {V_{50}}}}{{\lg \sigma }}} \right]} \right) $$ (7) 则累积概率为
$$ P\left( V \right) = \int_0^{\lg V} {p\left( V \right)} {\text{d}}\lg V $$ (8) 经过战地试验,建立了目标传输概率函数(TTPF),至少需要50%的点(V50)落在目标识别任务曲线上。TTPF曲线可近似为
$$ P = \frac{{{{\left( {V/{V_{50}}} \right)}^E}}}{{1 + {{\left( {V/{V_{50}}} \right)}^E}}} $$ (9) $$ E = 1.51 + 0.24\left( {\frac{V}{{{V_{50}}}}} \right) $$ (10) 式中:V50为完成任务概率为50%可分辨周期数,一般由实验测得;V为目标任务周期数。为了对比约翰逊准则的N50值,通过人眼测试实验,得到不同任务的目标识别周期数,即V50∶N50=2.7∶1。
结合目标的观测距离和目标的临界特征尺寸,目标的临界特征尺寸一般通过对目标表观面积开方得到,从而计算出该目标在此距离下的等效周期数:
$$ V = \frac{{\sqrt {{A_{{\text{tgt}}}}} }}{R}{\text{TTP}} $$ (11) 式中:${A_{{\text{tgt}}}}$为目标面积;$R$为目标与探测器间的距离。
2 动目标探测性能实验评估方法
为了准确评估运动目标的探测性能,采用人眼视觉观测实验方法进行目标探测性能鉴别,同时将实验结果与TTP准则现场性能预测模型的计算结果进行对比分析,从而获得动目标性能评估预测模型。
2.1 实验测试平台搭建
用于动目标探测性能评估的实验系统主要由红外靶标系统、黑体、测温仪、运动导轨、红外热像仪及数据采集卡组成。实验设备总体布局图及靶标成像结果说明示意图如图2所示。
主要硬件系统设计如下。
1) 红外目标生成系统。面元黑体及透射式测试靶标组成红外目标生成系统,如图2(a)所示。面元黑体紧贴放置于测试靶标的后方,为目标提供透射辐射,红外辐射经靶标孔缝隙进入红外热像仪中成像,面元黑体温度即为目标温度。背景温度为测温仪测量获取的均匀墙面背景的温度。通过调节面元黑体温度,获取不同的目标背景对比度值。实验靶标尺寸为2 mm×2 mm,面元黑体型号为SR800N-12A-ET,具体性能参数如表1所示。
表 1 面元黑体性能参数Table 1. Performance parameters of face element blackbody参数 指标 发射率 0.98±0.02 温度范围/℃ 10~80 控温精度/℃ 0.007@0<T<50
0.015@T>50温度一致性/℃ ±0.01 温度稳定性/℃ ±0.008@ΔT>10 分辨率/℃ 0.001 2) 靶标运动系统。靶标运动系统由数控直线导轨滑台、可编程控制PLC、直线模组开关组成。为模拟目标的机动情况,将靶标安装于轨道夹上,利用PLC将电机带动齿轮的转动转化为轨道夹直线运动状态,即靶标在导轨上做直线运动,靶标运动系统的速度控制范围为0~1 000 mm/min。实验过程中分别模拟了目标直线运动速度为0(静止)、1 m/min~10 m/min时的运动情况。
3) 目标采集及存储系统。红外热像仪与具有图像数据采集卡的计算机组成目标采集及存储系统。实验用红外热像仪型号为FLIR SC7000MW,具体性能参数如表2所示。
表 2 红外热像仪性能参数Table 2. Thermal infrared imager performance parameters参数 指标 工作波长/μm 3.7~4.8 探测器类型 MCT 温度范围/˚C −20~1 500 测量精度/˚C ±1(5~100),1%(>100) NETD/mK <20 帧率/Hz 230 温度稳定性/˚C ±0.5 视场/(˚) 11×8 分辨率/pixels 320×256 像元尺寸/μm 30×30 2.2 实验条件
为了获得准确的实验数据,实验环境应遮光且恒温,同时需要综合考虑以下限定条件:
1) 导轨振动误差。目标在运动过程中导致导轨发生振动,导轨振动对目标运动的轨迹造成干扰。为了避免导轨振动引入的目标鉴别误差,实验中利用结构件固定减震垫,减少靶标振动对目标运动轨迹的扰动。
2) 背景温度时变误差。目标(靶标)是在铝板上刻划获得,故背景为除目标外的均匀铝板。针对背景温度因铝板材料吸热特性随时间增加而产生变化的情况,实验过程中为了控制单一变量,当背景温度发生变化时,通过微调目标(靶标)温度,保证目标背景温差恒定。
3) 大气衰减误差。目标(靶标)与面元黑体间存在一定的距离,为了保证面元黑体温度设置尽可能与目标(靶标)温度相等,在实验过程中将目标(靶标)紧贴面元黑体,避免大气衰减造成的目标与背景温度误差。
4) 背景温度读数误差。背景温度与室温近似,为了避免人为身体触碰靶标造成背景温度升高的情况,实验过程中避免身体接触靶标。
2.3 动目标探测性能评估实验流程
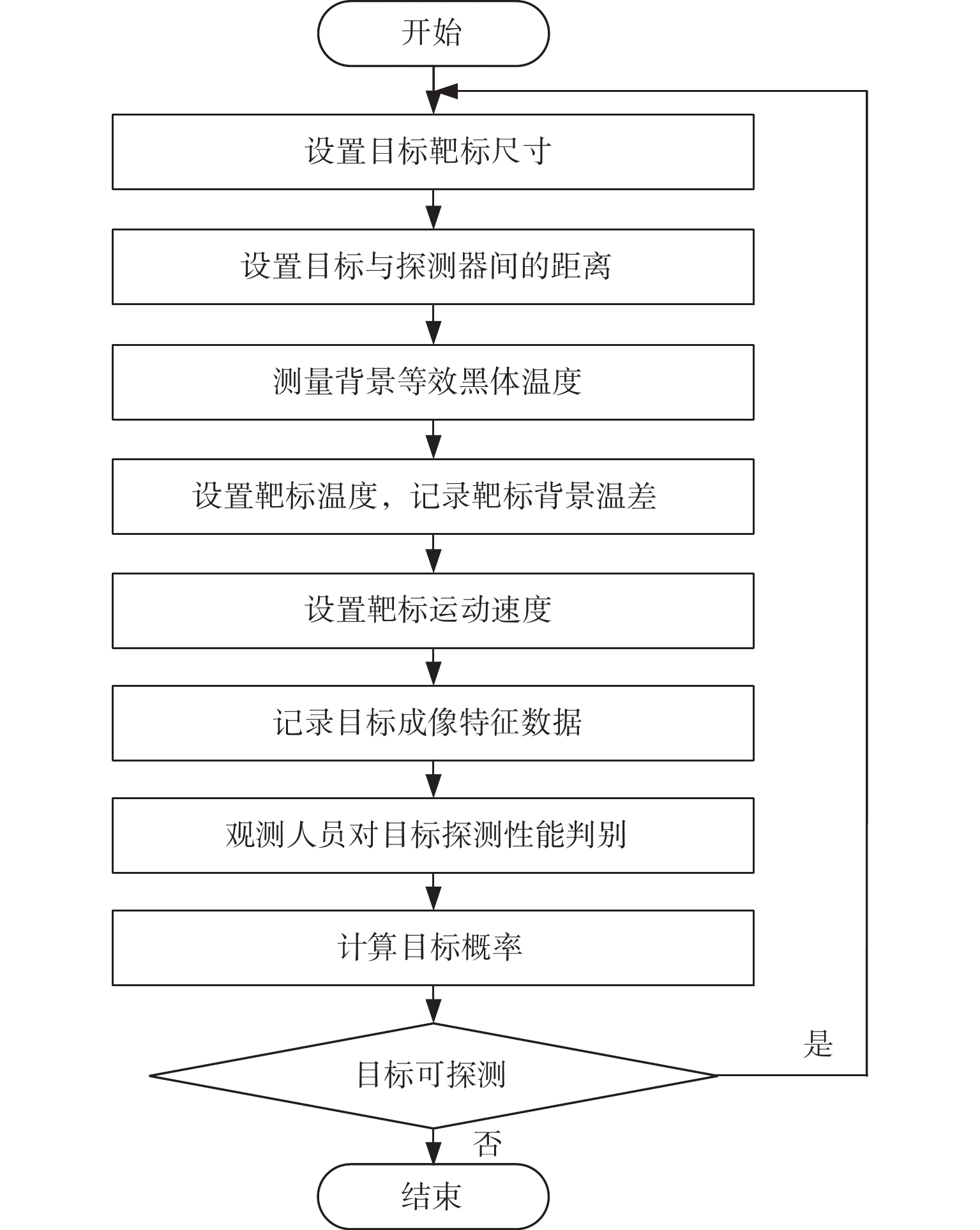
在运动目标探测性能实验评估过程中,将不同移动速度的方形靶标作为观测目标进行探测性能评估。首先,设置靶标尺寸及目标与红外热像仪间的成像距离;接着利用红外热像仪测量目标周围的背景温度,并调整黑体温度,进行靶标温度的调整,记录目标与背景间的温差;然后调整目标的运动速度,对运动目标的成像特征进行采集并存储;最后组织20位观测人员对目标成像性能进行评估,且观测者必须对目标的可探测性进行判读,计算目标的探测概率。当所有观测人员均无法探测目标时结束实验,否则保证观测实验的测试条件完全相同且独立的情况下,重复上述实验,通过改变单一参量(目标运动速度、成像距离、靶标尺寸)实现目标探测性能的评估。动目标探测性能评估实验流程如图3所示。
![]() 图 3 动目标探测性能实验评估流程Figure 3. Experiment evaluation process of moving target detection performance
图 3 动目标探测性能实验评估流程Figure 3. Experiment evaluation process of moving target detection performance为了对比分析NVThermIP模型对动目标探测性能评估的适用性,根据NVThermIP模型对上述系统的性能进行评估,在系统参数输入设置一致情况下,结合目标传递概率函数获得目标探测任务等级,计算目标探测概率。将基于NVThermIP模型计算获得的目标探测概率与实验评估的目标探测性能进行对比分析,为进一步实现NVthermIP性能模型在动目标探测性能评估的应用和改进,提供数据和理论支撑。
2.4 实验测量与NVThermIP现场性能预测结果对比
为了评估基于NVThermIP侦察性能模型在动目标探测性能评估的适用性,文中利用上述搭建的实验平台,探讨了不同成像距离、靶标尺寸、目标运动速度下目标的探测性能。同时,在系统参数输入设置一致情况下,将基于人眼视觉的实验测量结果与基于NVThermIP侦察性能模型的理论计算结果进行了对比分析,为NVThermIP侦察性能模型在动目标侦察性能评估的修正提供了数据支撑。
1) 目标不同运动速度。
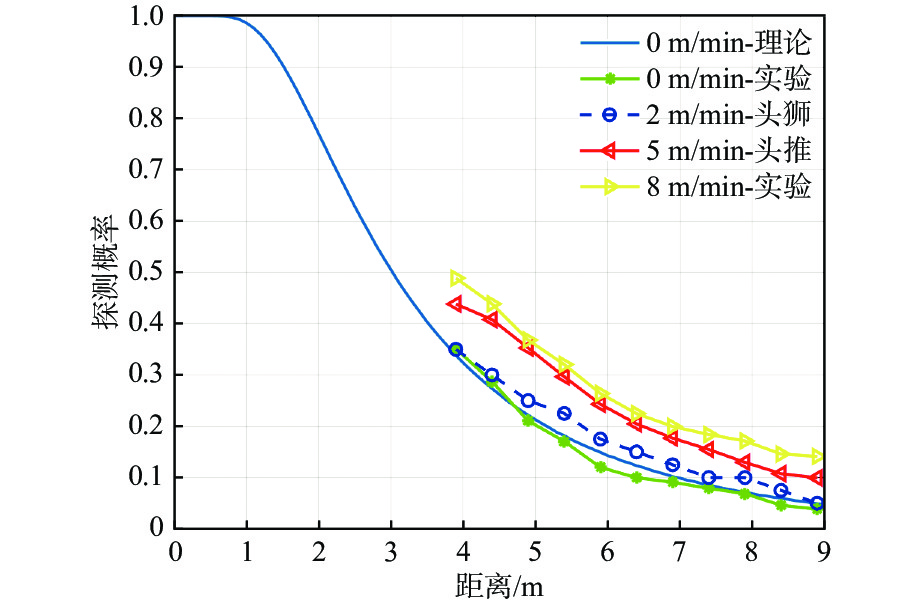
实验测量获得了目标背景温差为4.5 K,目标靶标尺寸为2 mm×2 mm方形靶,成像距离为3.9 m、…8.9 m(步长为0.5 m),运动速度分别为0 m/min~9 m/min(步长为1 m/min)时的目标成像结果,如图4所示。图4(a)、4(b)、4(c)为目标在不同成像距离且处于静止状态时的成像结果,图4(d)、4(e)、4(f)分别为目标在不同成像距离且运动速度为2 m/min和5 m/min时的成像结果。
组织20位观测人员对上述不同成像距离时的目标探测能力进行评估,观测者必须对目标是否被探测进行判读。计算不同成像距离时的目标探测性能,并与NVThermIP现场性能预测结果进行对比分析。不同成像距离时的目标探测评估实验结果如图5所示。
![]() 图 5 不同成像距离时的目标探测评估结果Figure 5. Target detection and evaluation results at different imaging distances
图 5 不同成像距离时的目标探测评估结果Figure 5. Target detection and evaluation results at different imaging distances由上述结果可知,在目标处于静态时,基于NVThermIP现场性能预测模型的计算结果与实验测量获得的目标探测概率结果基本吻合,验证了设计的目标探测性能评估实验方法的可行性。由图5实验结果可以看出,随着目标运动速度由2 m/min提升到8 m/min时,目标探测概率有上升的趋势,同时目标运动速度由2 m/min提升到5 m/min时目标探测概率上升速度相比5 m/min提升到8 m/min更快。因此,在实验测量的目标运动速度范围内,随着目标运动速度的提升,目标更易被探测到。
2) 不同靶标尺寸。
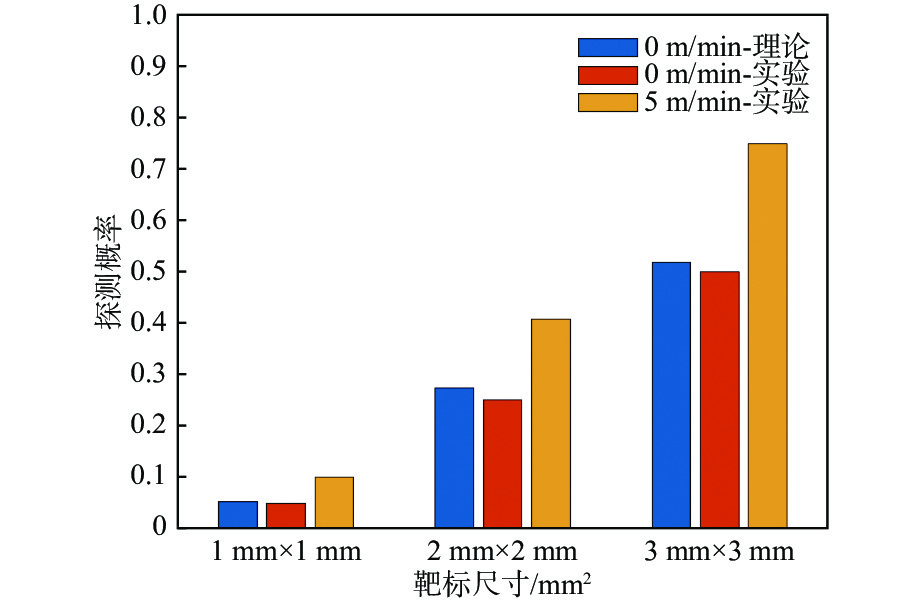
实验测量获得了目标背景温差保持恒定为4.5 K,运动速度分别为0 m/min和5 m/min,成像距离为4.4 m,靶标尺寸分别为1 mm×1 mm、2 mm×2 mm、3 mm×3 mm的目标成像结果,如图6所示。图6(a)、6(b)、6(c)为目标处于静止状态下不同靶标尺寸的目标成像结果,图6(d)、6(e)、6(f)分别为不同靶标尺寸下目标在不同运动时刻的成像结果。
组织20位观测人员对上述不同靶标尺寸下的目标探测能力进行评估,且观测者必须对目标是否被探测进行判读。计算不同靶标尺寸下的目标探测性能,并与NVThermIP现场性能预测结果进行对比分析。不同靶标尺寸的目标探测评估实验结果如图7所示。
由上述结果可知,目标处于静态时,理论预测模型计算结果与实验测量获得的目标探测概率结果基本吻合;在同一成像距离下,随着目标(靶标)尺寸的增大,目标被探测的可能性逐渐增大;在相同靶标尺寸和运动状态下,运动目标较静止目标具有更大的探测概率。
![]() 图 7 不同靶标尺寸的目标探测评估Figure 7. Target detection and evaluation results of different target sizes
图 7 不同靶标尺寸的目标探测评估Figure 7. Target detection and evaluation results of different target sizes3 结论
通过搭建动目标性能评估实验系统,实验测量获得了不同成像距离、不同目标运动速度及不同靶标尺寸下的目标探测概率,并且在相同输入条件下,结合NVThermIP现场性能预测模型,计算了目标静态时的探测概率。将两者结果进行对比可以发现,NVThermIP现场性能预测模型对动目标的探测性能预测存在一定偏差,同时在实验测量的目标运动速率范围内,随着目标运动速率的提升,目标更易被探测。因此,为了将NVThermIP现场性能预测模型用于运动目标的探测性能评估,需要综合考虑人眼对动目标捕获的物理模型,进一步对模型进行修正。实验结果为动目标性能预测模型的修正提供了实验方法和数据支持。
-
![]()
图 3 动目标探测性能实验评估流程
Figure 3. Experiment evaluation process of moving target detection performance
![]()
图 5 不同成像距离时的目标探测评估结果
Figure 5. Target detection and evaluation results at different imaging distances
![]()
图 7 不同靶标尺寸的目标探测评估
Figure 7. Target detection and evaluation results of different target sizes
表 1 面元黑体性能参数
Table 1 Performance parameters of face element blackbody
参数 指标 发射率 0.98±0.02 温度范围/℃ 10~80 控温精度/℃ 0.007@0<T<50
0.015@T>50温度一致性/℃ ±0.01 温度稳定性/℃ ±0.008@ΔT>10 分辨率/℃ 0.001  下载: 导出CSV
下载: 导出CSV
表 2 红外热像仪性能参数
Table 2 Thermal infrared imager performance parameters
参数 指标 工作波长/μm 3.7~4.8 探测器类型 MCT 温度范围/˚C −20~1 500 测量精度/˚C ±1(5~100),1%(>100) NETD/mK <20 帧率/Hz 230 温度稳定性/˚C ±0.5 视场/(˚) 11×8 分辨率/pixels 320×256 像元尺寸/μm 30×30
下载: 导出CSV
-
[1] 张冬阳, 张建奇. 面向三角靶标的人眼对比度阈值特性实验表征[J]. 西安电子科技大学学报(自然科学版), 2016, 43(6): 91-96. ZHANG Dongyang, ZHANG Jianqi. Experimental characterization of the human vision contrast threshold for the triangle pattern[J]. Journal of Xidian University, 2016, 43(6): 177-201.
[2] 李捷菲, 尼启良, 王富昕. 适用于微弱信号检测的低噪声仪表放大器[J]. 吉林大学学报(信息 科学版), 2019, 37(3): 547-559. LI Jiefei, NI Qiliang, WANG Fuxin. Low noise instrumentation amplifier for small signal detection[J]. Journal of Jilin University(Information Science Edition), 2019, 37(3): 547-559.
[3] BIBERMAN L M. Electro-optical imaging: system performance and modeling[M]. Bellingham, Washington: SPIE Press, 2000: 73-81.
[4] 王惠林, 栾亚东, 贺剑. 红外成像系统最小可分辨温差影响因素分析[J]. 应用光学, 2021, 42(1): 1-8. WANG Huilin, LUAN Yadong, HE Jian. Analysis on influence factors of MRTD in infrared imaging system[J]. Journal of Applied Optics, 2021, 42(1): 1-8.
[5] 孙明昭, 田超, 王佳笑. 不同大气条件下红外成像系统作用距离评估[J]. 激光与红外, 2017, 47(3): 304-307. SUN Mingzhao, TIAN Chao, WANG Jiaxiao. Evaluation on operating range of infrared imaging system under different atmospheric conditions[J]. Laser & Infrared, 2017, 47(3): 304-307.
[6] 吴颖霞, 张建奇, 杨红坚, 等. Johnson准则在红外成像系统外场识别性能评估中的应用[J]. 光子学报, 2011, 40(3): 438-442. doi: 10.3788/gzxb20114003.0438 WU Yingxia, ZHANG Jianqi, YANG Hongjian, et al. Application of Johnson criteriain evaluating field detection and recognition probability of IR System[J]. Acta Photonica Sinica, 2011, 40(3): 438-442. doi: 10.3788/gzxb20114003.0438
[7] BIJL P, VALETON J M. TOD: a new method to characterize electro-optical performance[C]// Aerospace defense sensing and controls. Washington: International Society for Optics and Photonics, 2018: 182-193.
[8] MAURER T, DRIGGERS R G, VOLLMERHAUSEN R H, et al. 2002 NVTherm improvements[C]//AeroSense 2002. Washington: International Society for Optics and Photonics, 2002: 15-23.
[9] PREECE B L, FLUG E A. A wavelet contrast metric for the targeting task performance metric[J]. SPIE, 2016, 9820: 98200E-11.
[10] 郭丽文. 基于TTP准则的红外成像系统性能评估技术研究[D]. 哈尔滨: 哈尔滨工业大学, 2021. GUO Liwen. Research on performance evaluation technology of infrared imaging system based on TTP criterion[D]. Harbin: Harbin Institute of Technology, 2021.
[11] TEANEY B P, TOMKINSON D M, HIXSON J G. Legacy modeling and range prediction comparison: NV-IPM versus SSCamIP and NVTherm[J]. SPIE, 2015, 9452: 94520P-12.
[12] 王惠林, 宁飞, 冯涛. 基于TTP准则的光电侦察设备作用距离评估[J]. 应用光学, 2019, 40(增刊): 1-7. WANG Huilin, NING Fei, FENG Tao. Analysis on influence factors of MRTD in infrared imaging system[J]. Journal of Applied Optics, 2019, 40(Sup): 1-7.
[13] 杨卫, 赵迪, 刘前进. 针对运动目标感知的动静态双坐标探测系统[J]. 红外与激光工程, 2014, 43(1): 279-283. YANG Wei, ZHAO Di, LIU Qianjin. Moving targets perception of static and dynamic double coordinate detection system[J]. Infrared and Laser Engineering, 2014, 43(1): 279-283.
[14] VOLLMERHAUSEN R. Night vision integrated performance model: impact of a recent change on the model’s predictive accuracy[J]. Optics Express, 2016, 24: 23654-23666. doi: 10.1364/OE.24.023654
[15] KOU R K, WANG C P, FU Q, et al. Detection model and performance evaluation for the infrared search and tracking system[J]. Applied Optics, 2023, 62(2): 398-410. doi: 10.1364/AO.469807
[16] 徐尉豪. 基于机器视觉的动态环境运动目标智能识别研究[J]. 激光杂志, 2022, 43(1): 29-32. XU Weihao. Automatic recognition of moving objects in dynamic environment based on machine vision[J]. Laser Journal, 2022, 43(1): 29-32.
[17] HAILAN Y, WEILI C. Motion target detection and recognition based on YOLOv4 algorithm[J]. Journal of Physics: Conference Series, 2021, 2025(1): 35-42 .
-
期刊类型引用(5)
1. 张西广,张龙飞,樊银亭. 基于光纤传感器的视频图像几何失真校正方法. 激光杂志. 2024(03): 150-155 .  百度学术
百度学术
2. 杨斌,刘志凌,韩磊,李智伟,王振,安一峰,黄志锋. 喷淋水膜对固体表面红外辐射抑制研究. 红外与毫米波学报. 2024(02): 279-287 . 百度学术
3. 牟善浩 ,朱杉 ,宋涛 ,李杨 ,李伶 ,张燕 . 抗红外烟幕干扰气凝胶陶瓷材料的研究. 现代技术陶瓷. 2024(05): 456-464 . 百度学术
4. 付云鹏,范骏威,杨卫英,袁杰,刘梅楠,张祥瑞. 壁式喷头红外降温特性试验研究. 红外技术. 2023(05): 513-520 . 百度学术
5. 王振,朱森林,刘银水,李良才. 旋流式复合喷头红外降温特性试验分析. 中国舰船研究. 2022(04): 170-176 . 百度学术
其他类型引用(1)



计量
- 文章访问数: 116
- HTML全文浏览量: 17
- PDF下载量: 60
- 被引次数: 6
 陕公网安备 61011302001501号
陕公网安备 61011302001501号 