
Fast and high-precision electric adjusting mirror
-
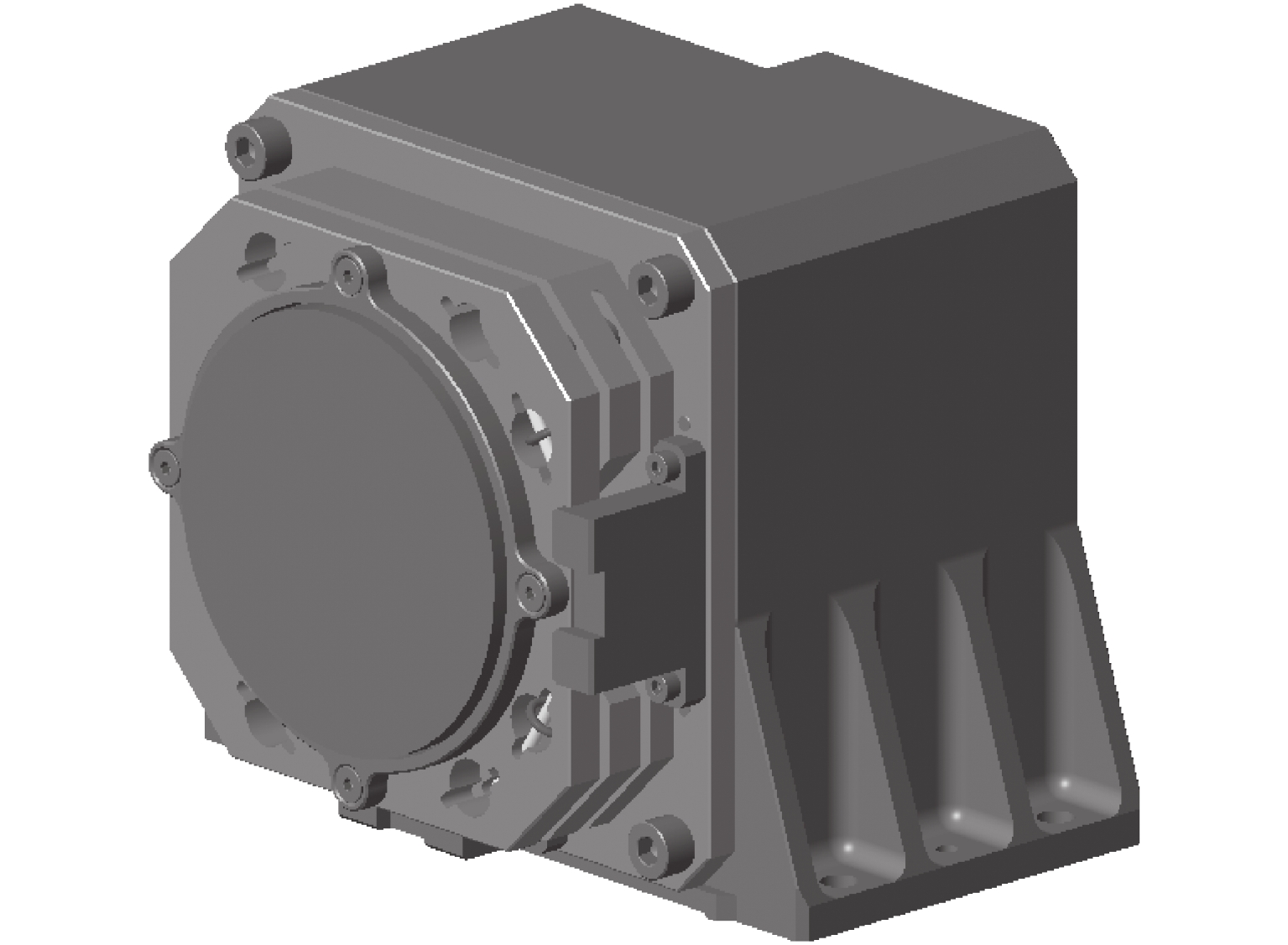
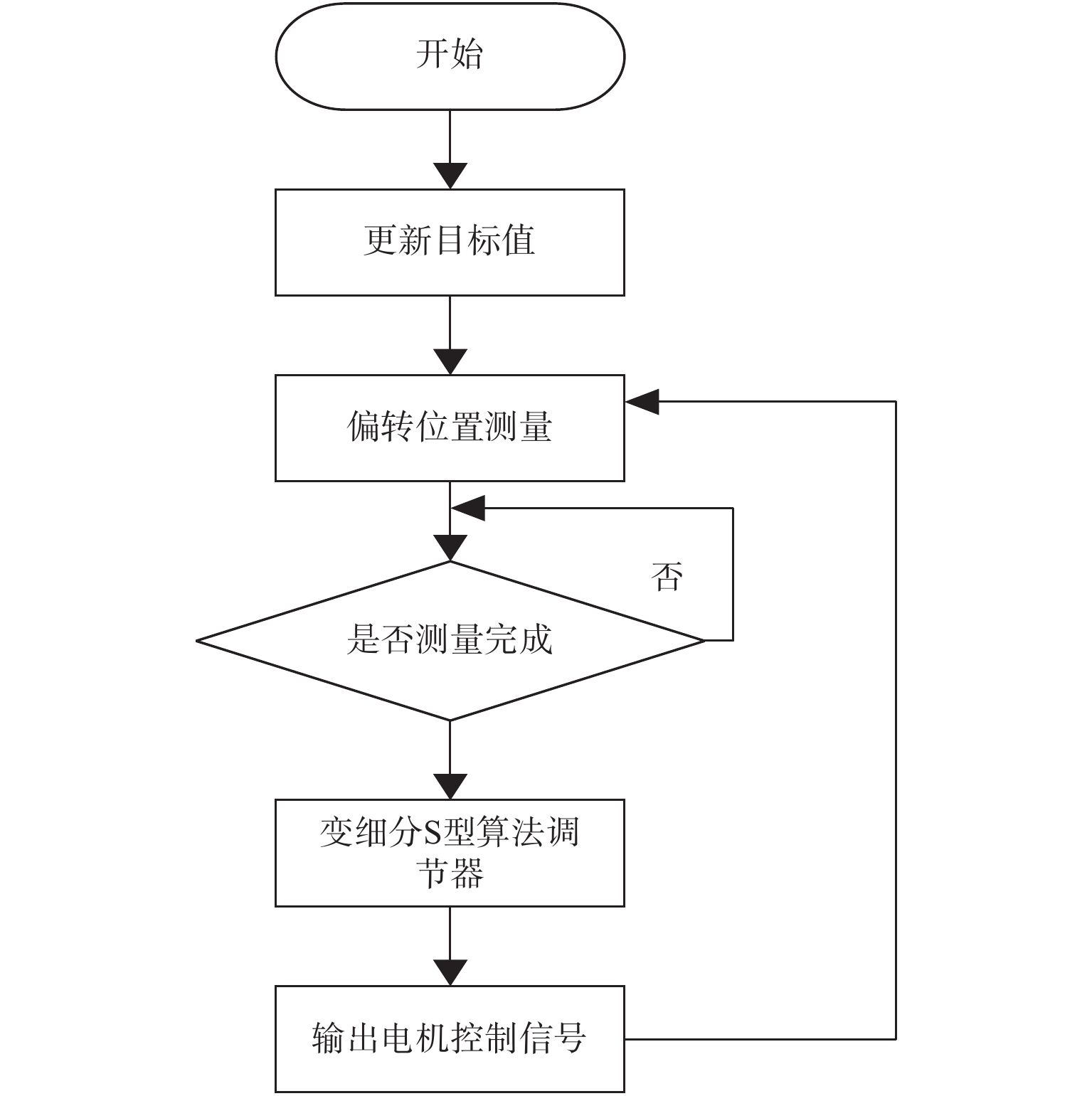
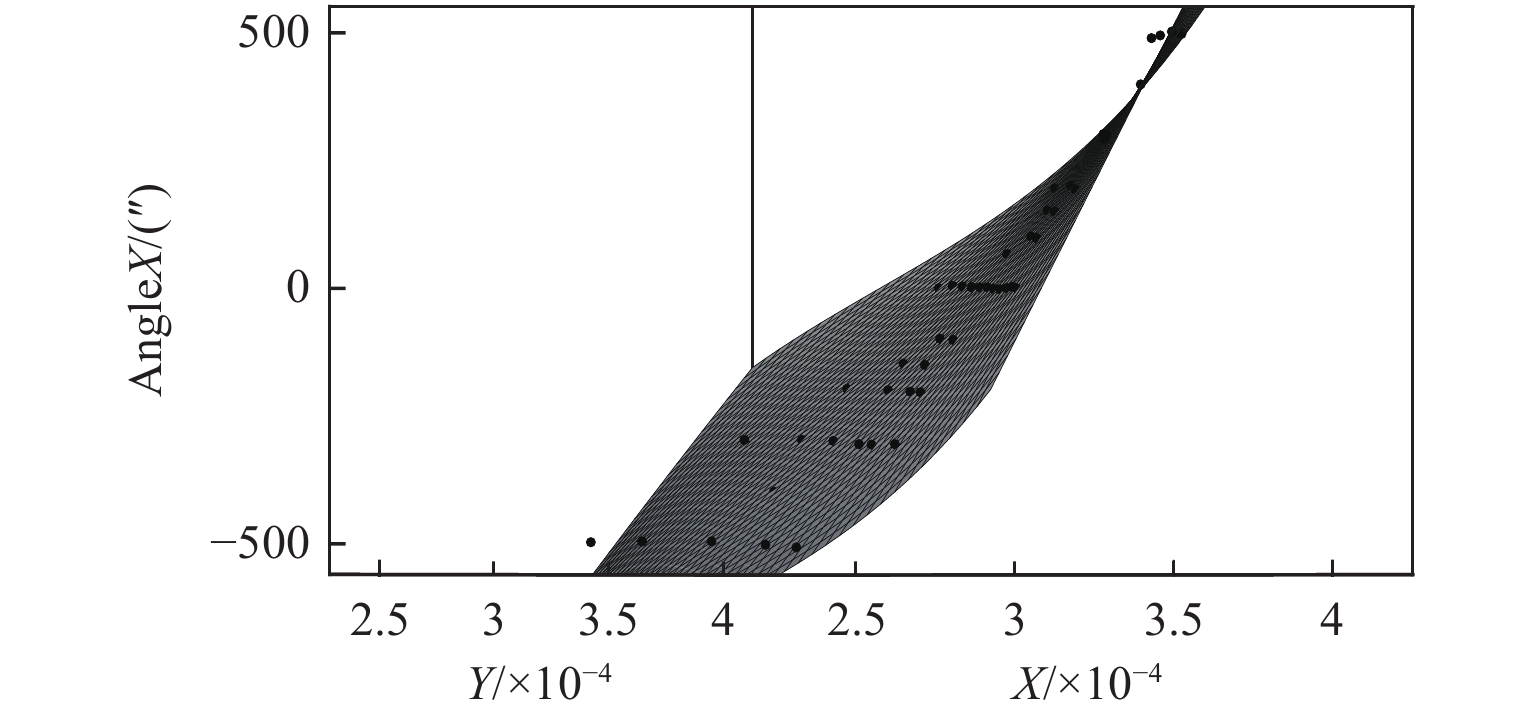
摘要: 高能激光合束系统中反射镜在工作前需要进行快速高精度的指向调整。设计了一种二维电控调整镜,系统主体采用一体化的柔性支撑设计,驱动采用步进电机配合减速机构带动螺杆实现,反射镜偏转角度的精密测量采用电涡流传感器,使用数字信号处理器(DSP)作为主控模块。对系统的工作原理和设计进行了分析,对系统标定方法和控制算法进行了深入研究。为了满足系统调整速度的要求,采用S形加减速算法作为调整镜的控制算法,采用分段线性的系统标定方法。最后对系统进行了实验测试,结果表明,在±500″角度范围内,调整镜到位时间在3 s以内,控制误差小于2″,可以满足系统要求。Abstract: The mirror in the high-energy laser beam combining system needs to make a fast and high-precision pointing adjustment before working. A two-dimensional electrically controlled adjusting mirror was designed. The main body of the system adopted an integrated flexible support design, the drive adopted a stepping motor and a deceleration mechanism to drive the screw, the precision measurement of the mirror deflection angle adopted an eddy current sensor, and the digital signal processor (DSP) was adopted as the main control module. The working principle and design of the system were analyzed, and the system calibration method as well as the control algorithm were deeply studied. In order to meet the requirements of system adjustment speed, the S-shaped acceleration and deceleration algorithm was adopted as the control algorithm of adjusting mirror, and the system calibration method with piecewise linearity was adopted. Finally, the system was tested experimentally. The experimental results show that within the angle range of ±500″, the in-position time of adjusting mirror is within 3 s, and the control error is less than 2″, which can meet the system requirements.
-
引言
鱼眼和复眼是自然界两种典型的广角成像系统。仿生鱼眼镜头是利用鱼眼广角成像原理设计的短焦距镜头,视场可超过180°[1],缺点是镜组复杂,畸变大且分辨率不高,特别是边缘视场的变形非常明显,多用于视频监控。与高等动物的单眼不一样,昆虫的视觉由复眼产生。复眼系统由许多小眼构成,例如蜻蜓每只复眼有28 000个小眼。这些小眼排列成球面上的阵列,以获得接近240°的大视场。但是小眼直径一般为15 μm~50 μm,其承担的局部视场仅有几度,分辨能力比人眼低,视力仅1 m左右[2]。
事实上,大视场和高分辨率是成像系统设计的一对根本矛盾[3-6],究其根本在于系统的空间带宽积(space-bandwidth product,SBP)受限,SBP可解释为像平面上能够解析的点数[7-8]。提高SBP意味着随着成像系统尺度的增大,系统复杂性也迅速增加,以平衡几何像差的影响,达到或接近衍射受限条件。成像系统设计遵循基本的比例缩放规律,即焦距、口径及其他长度量纲的参数增大M倍,横轴像差与波像差随之同比例增大,而所有角度、曲率参数保持不变。多尺度成像原理正是根据比例缩放规律,采用两级或多级成像,在大视场与小像差之间取得平衡。美国杜克大学Brady研究小组首先提出多尺度设计的概念[8],将成像系统分为物镜透镜组和后端小相机阵列两部分,并先后公开了系列十亿像素级相机的多尺度设计结果[3, 10-14]。
从仿生学的角度看,这种多尺度设计是混合了鱼眼-复眼的仿生结构。前级为仿生鱼眼的物镜设计,其尺度与集光率及角分辨率指标匹配,且像面为同心球面,而不必是传统镜头所要求的平面;次级为仿生复眼的小型目镜阵列,排列成球面形状,将物镜成像中继到各个目镜的像平面探测器阵列上。目镜阵列因口径较小,能很好地校正局部小视场的像差,并且制造成本不高,可以适当增加复杂性,实现接近衍射极限的高清成像。
1 物镜采用双层同心球透镜的成像系统
1.1 成像系统设计
参考十亿像素相机设计[15],物镜结构为同心双胶合球透镜,设计波长为可见光(486.132 7 nm、587.561 8 nm和656.272 5 nm)。中心为整球,材料为成都光明的K9玻璃;与整球胶合的是2个半球窝透镜,外径为129.6 mm,材料为成都光明的F4玻璃。该设计具有球对称性,对于次级小口径目镜来说像差都是相同的,因而可用完全相同的目镜阵列。目镜设计主要平衡球差和色差,基于双高斯镜头结构,材料为成都光明的低成本玻璃,口径约为10 mm,以各面的曲率半径和光学间隙为优化变量进行优化。整个两级成像系统的光学设计如图 1所示,相邻目镜的光轴夹角为5°,全视场大于±50°。
![]() 图 1 双层同心球透镜作为物镜的成像系统设计Figure 1. Imaging system design using concentric double ball lenses as objective
图 1 双层同心球透镜作为物镜的成像系统设计Figure 1. Imaging system design using concentric double ball lenses as objective系统孔径光阑的直径为4.38 mm,设在目镜组中第2个双胶合透镜前。系统主要参数如下:有效焦距f=52.667 6 mm,总长L=286.062 2 mm,像方光圈数F=3.2,入瞳孔径EPD=16.458 4 mm。在中间波长λ=587.56 nm下按照望远系统计算角分辨率为δ=43.55 μrad(9.0″)。选用MT9J003 CMOS探测器,静态模式像面尺寸为6.119 mm×4.589 mm,像素数3 664×2 748,像素尺寸1.67 μm×1.67 μm,对应CMOS满视场为±(3.32°×2.49°)。
由于目镜阵列是关于物镜球心对称的,每个目镜的成像性能即代表了全视场的成像性能。图 2(a)为单路目镜对无穷远目标成像的0~2.5°视场全色调制传递函数(modulation transfer function,MTF)曲线,±2°视场内在200 lp/mm频率处的MTF均大于或接近0.3,具有很好的像质。因图像拼接要求视场重叠(渐晕),2.5°视场的子午MTF下降较明显。图 2(b)是畸变,在边缘视场2.5°的畸变小于3%。另一方面,将物距从无穷远依次调整为5 km和300 m,发现无需调焦,MTF和弥散斑变化很小,说明系统具有很大的景深,可同时在300 m至无穷远目标较好成像。进一步,将物距改为20 m,通过像面位置调整(约0.14 mm),也可以得到很好的MTF,说明系统适当调焦后也可用于近距离目标成像。
![]() 图 2 双层同心球透镜作为物镜的系统成像性能Figure 2. Imaging performance using concentric double ball lenses as objective
图 2 双层同心球透镜作为物镜的系统成像性能Figure 2. Imaging performance using concentric double ball lenses as objective1.2 成像性能测试
将物镜和单路目镜的两级成像系统组装在一起后,首先采用波面干涉仪测量系统波像差。测量原理如图 3(a)所示,波面干涉仪发出准直光入射到物镜上,在像平面处聚焦于一点;与该点共焦放置一个标准球面反射镜,可将测试光束原路返回并最终回到干涉仪,与干涉仪镜头参考面形成干涉,干涉图反映了系统波前误差的大小。图 3(b)是测量现场照片,图 3(c)是波前误差测量结果,由于中心存在反射鬼像,PV值受噪声点影响较明显,RMS值为0.043λ,满足Maréchal判据,即可认为系统成像接近衍射极限。
图 4(a)是成像系统获取的3 km距离目标图像,其中近处距离约100 m的树枝树叶清晰可见,远处嘉熙中心大楼距离约3 km,局部放大后如图 4(b)所示,大楼顶部“JIAXI CENTER”字样清晰可见(裸眼不可见),说明相机具有大景深特点。
图 5(a)是获取的距离7.4 km的顺天国际金融中心图像,局部放大图像如图 5(b),“顺天IFC”、“中国铁建”等字样清晰可见,玻璃窗格、塔吊桁架甚至楼顶避雷针等细长目标也清晰可辨。
图 6(a)、6(b)为距离20 m和40 m的USAF-1951分辨率板所成的像,据此估算系统的角分辨率为8″~10″,与系统对无穷远目标成像的分辨率设计指标相当。
2 物镜采用单个球透镜的成像系统设计
采用双层同心球透镜形式的物镜,要求半球碗与被包覆的中心球的曲率半径相等,2个透镜材料的热膨胀系数以及折射率必须匹配,使得可选材料受限,力学稳定性和热稳定性较差,且制造成本较高,还存在胶合偏心的影响。尽管物镜采用多层同心球的形式确实能够得到更好的中继像质[6],由于次级目镜系统具有很强的像差校正能力,为了简化物镜系统,完全可用单个球透镜形式,其剩余像差通过优化目镜系统进行校正。因此尝试物镜采用直径129.6 mm单一球透镜结构,玻璃材料选用K9。小口径的目镜组设计仍然基于双高斯镜头结构,包括依次布置的双凸透镜、2个双胶合透镜、调焦镜组以及焦平面探测器。为降低成本,目镜组所有透镜均为平面或球面透镜。通过优化曲率半径、光学间隙等参数,得到设计结果如图 7所示。
![]() 图 7 单个球透镜作为物镜的成像系统设计Figure 7. Imaging system design using single ball lens as objective
图 7 单个球透镜作为物镜的成像系统设计Figure 7. Imaging system design using single ball lens as objective同样由于球对称性,各目镜完全相同,只需考察单路目镜对局部小视场的像差校正能力。系统主要参数:有效焦距f=50.379 8 mm,总长L=264.725 mm,像方光圈数F=2.974,入瞳孔径EPD=16.939 4 mm。图 8(a)所示为系统在无穷远物距、0~3.5°视场下的单路目镜成像的全色MTF,图 8(b)是畸变,在边缘视场3.5°的畸变约为4.5%。调整物距,发现该系统同样具有大景深特点。
![]() 图 8 单个球透镜作为物镜的系统成像性能Figure 8. Imaging performance using single ball lens as objective
图 8 单个球透镜作为物镜的系统成像性能Figure 8. Imaging performance using single ball lens as objective图 8与图 2对比可见采用单个球透镜物镜的成像系统通过目镜的像差校正,甚至成像性能比双层同心球透镜物镜的成像系统更优:局部小视场可达到±3.5°,从而可满视场成像且相邻目镜的重叠视场更大,镜筒之间的间隔也可以更大,有利于光机设计;±2°视场内在200 lp/mm频率处的MTF均大于或接近0.3,子午面内的边缘视场±3.5°处MTF仍然大于0.1。
图 9是该系统的光机设计,采用免装调物镜镜筒结构,前端与球透镜配合,后端球冠曲率中心与球透镜中心重合,球冠上布满阵列孔,用于装配目镜阵列。该系统正在进行透镜和镜筒的加工,从光学设计结果对比看,有望获得优于图 4~图 6的成像质量,后续将进行广角目标成像实验,完成阵列图像获取与拼接。
![]() 图 9 单个球透镜作为物镜的成像系统光机设计Figure 9. Optomechanical design of imaging system using single ball lens as objective
图 9 单个球透镜作为物镜的成像系统光机设计Figure 9. Optomechanical design of imaging system using single ball lens as objective3 结论
混合仿生的两级成像系统很好地解决了大视场与高分辨率的矛盾,其中物镜采用仿生鱼眼的球透镜结构,增大入瞳孔径收集广角目标光线;目镜采用仿生复眼结构,通过小口径透镜组阵列进行像差校正实现近衍射极限成像。设计结果表明,物镜采用单个球透镜也可以获得与双层同心球透镜相当甚至更优的成像性能,从而避免双胶合球透镜带来的公差控制和力学及热稳定性问题。系统可在100°全视场内达到角分辨率优于10″、畸变小于5%的指标,应用于侦查监控等领域,可实现广角目标的高清成像。
-
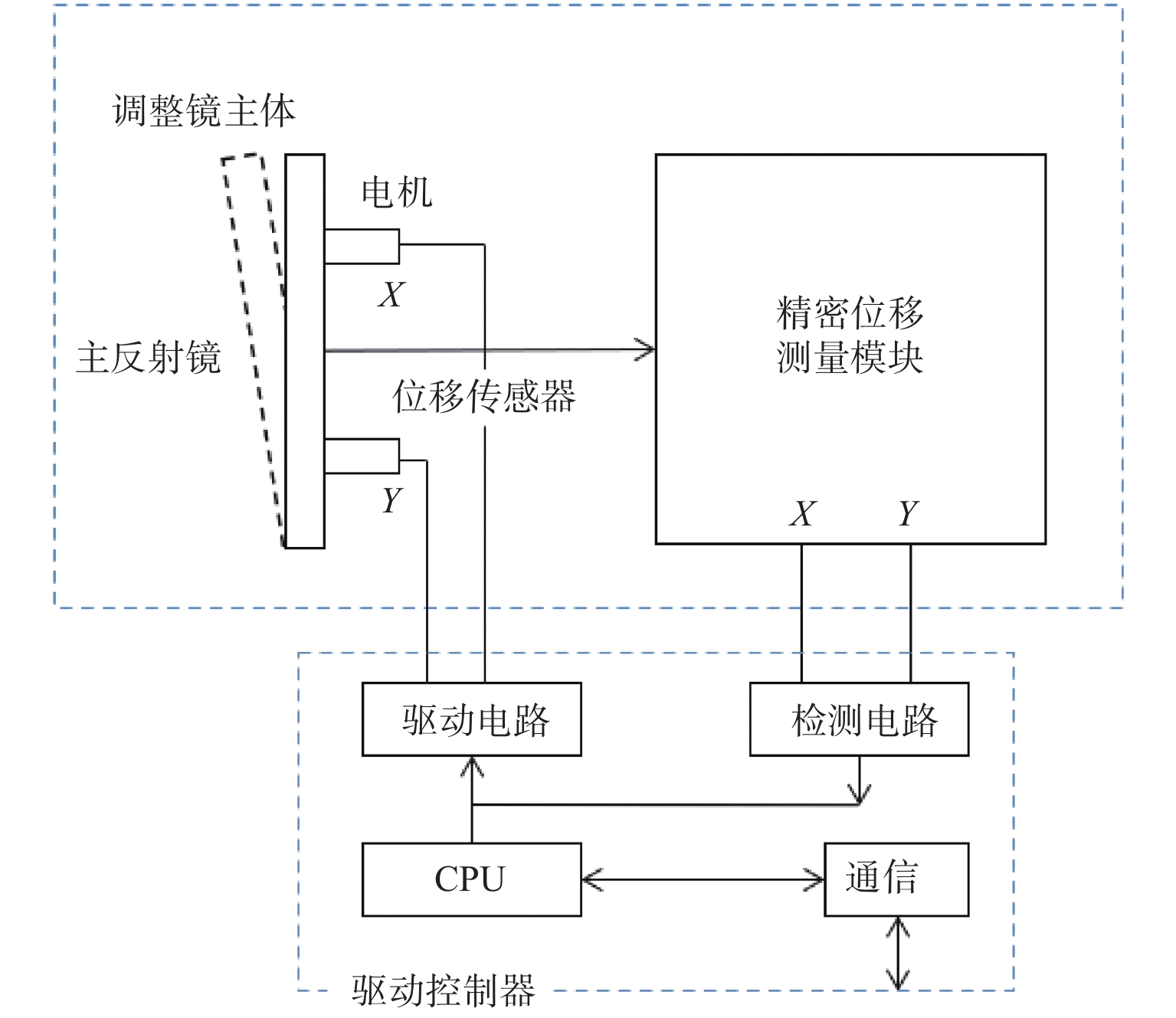
![]()
图 1 调整镜系统工作原理示意图
Figure 1. Schematic diagram of working principle of adjusting mirror system
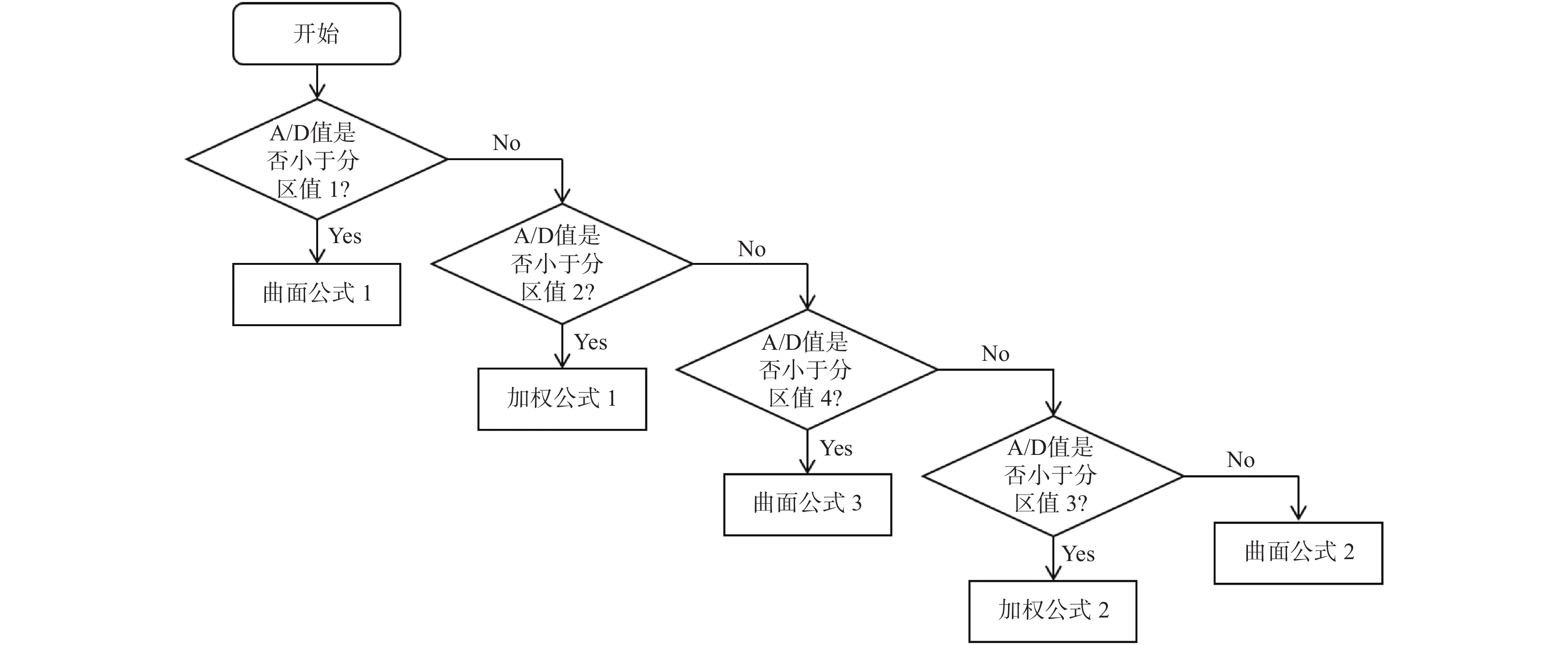
表 1 程序伪代码
Table 1 Program pseudo-code
伪代码 If A/D值<分区值1 角度值x=曲面公式1x If A/D值<分区值2 角度值x1=曲面公式1x 角度值x2=曲面公式2x 角度值x=加权(角度值x1+角度值x2) If A/D值>分区值5 角度值x=曲面公式3x If A/D值>分区值4 角度值x3=曲面公式3x 角度值x2=曲面公式2x 角度值x=加权(角度值x3+角度值x2) else 角度值x=曲面公式2x 函数返回值为角度值x  下载: 导出CSV
下载: 导出CSV
表 2 调整镜线性度测试表
Table 2 Linearity test of adjusting mirror
(″) X Y AngleX AngleY Error 0 0 0 0 0 50 50 50.6 50.3 0.6/0.3 100 −100 100.1 −101.2 0.6/1.2 150 150 150.3 150.2 0.3/0.2 200 200 200.5 201 0.5/1 −300 300 −301 300.3 1/0.3 400 −400 398.5 −401.4 −1.5/1.4 500 500 498.6 499.2 −1.4/−0.8
下载: 导出CSV
-
[1] 郭豹, 张兵, 黄伟, 等. 一种基于偏转镜的激光空间合束方法研究[J]. 电光与控制,2018,25(5):96-99. doi: 10.3969/j.issn.1671-637X.2018.05.020 GUO Bao, ZHANG Bing, HUANG Wei, et al. A laser beam-combining method in space based on deflection mirror[J]. Electronics Optics & Control,2018,25(5):96-99. doi: 10.3969/j.issn.1671-637X.2018.05.020
[2] FANG Chu, GUO Jin, YANG Guoqing, et al. Design and performance test of a two-axis fast steering mirror driven by piezoelectric actuators[J]. Optoelectronics Letters,2016,12(5):1-5.
[3] CHEN Wei, CHEN Sihai, WU Xin, et al. A new two-dimensional fast steering mirror based on piezoelectric actuators[J].IEEE: Information Science and Technology (ICIST), 2014(2): 1-5.
[4] 刘力双, 夏润秋, 吕勇, 等. 音圈电机快速控制反射镜研究现状[J]. 激光杂志,2020,41(9):1-7. LIU Lishuang, XIA Runqiu, LYU Yong, et al. Research situation of fast steering mirror driven by voice coil motor[J]. Laser Journal,2020,41(9):1-7.
[5] XIAO Ruijiang, XU Minglong, SHAO Shubao, et al. Design and wide-bandwidth control of large aperture fast steering mirror with integrated-sensing unit[J]. Mechanical Systems and Signal Processing,2019,126:211-213. doi: 10.1016/j.ymssp.2019.02.028
[6] 吴琼雁, 王强, 彭起, 等. 音圈电机驱动的快速控制反射镜高带宽控制[J]. 光电工程,2004,31(8):15-18. WU Qiongyan, WANG Qiang, PENG Qi, et al. Wide bandwidth control of fast-steering mirror driven by voice coil motor[J]. Opto-Electronic Engineering,2004,31(8):15-18.
[7] 凡木文, 黄林海, 李梅, 等. 抑制光束抖动的压电倾斜镜高带宽控制[J]. 物理学报,2016,65(2):1-8. FAN Muwen, HUANG Linhai, LI Mei, et al. High-bandwidth control of piezoelectric steering mirrorfor suppression of laser beam jitter[J]. Acta Physica Sinica,2016,65(2):1-8.
[8] 彭元镜, 许明明, 陈忆, 等. 大型矩形准直镜柔性支撑系统的多目标优化设计和稳定性分析[J]. 应用光学,2021,42(2):215-222. doi: 10.5768/JAO202142.0201002 PENG Yuanjing, XU Mingming, CHEN Yi, et al. Multi objective optimization design and stability analysis of flexible support system for large rectangular collimating mirror[J]. Journal of Applied Optics,2021,42(2):215-222. doi: 10.5768/JAO202142.0201002
[9] 廉明. 高精度大通光口径反射镜架微驱动组件的研究[D]. 哈尔滨: 哈尔滨工业大学, 2006. LIAN Ming. The research of high precision large caliber reflective mirror micro drive equipment[D]. Harbin: Harbin Institute of Technology, 2006.
[10] 彭树萍, 王伟国, 于洪君. 激光对准快速反射镜控制系统的设计[J]. 激光技术,2013(4):431-436. doi: 10.7510/jgjs.issn.1001-3806.2013.04.004 PENG Shuping, WANG Guowei, YU Hongjun. Design of a control system of fast reflector in a laser autocollimator[J]. Laser Technology,2013(4):431-436. doi: 10.7510/jgjs.issn.1001-3806.2013.04.004
[11] 姚绪梁, 张永奇, 王景芳. 一种变细分数的3D打印步进电机控制方法[J]. 电气传动,2019,49(1):65-67. YAO Xuliang, ZHANG Yongqi, WANG Jingfang. A method for controlling 3D printer stepper motor with variable subdivision[J]. Electric Drive,2019,49(1):65-67.
[12] SUN Shoumei, WANG Jinghui. Implementation of stepper motor's S-curve trajectories control[J]. Applied Mechanics and Materials,2015,3827:260-263.
[13] 赵继庭, 金刚石, 高旭辉. 基于快速反射镜的模糊自适应PID控制算法研究[J]. 激光与红外,2018,48(6):756-761. doi: 10.3969/j.issn.1001-5078.2018.06.016 ZHAO Jiting, JIN Gangshi, GAO Xuhui. Fuzzy adaptive PID control algorithm based on fast steering mirror[J]. Laser and Inferared,2018,48(6):756-761. doi: 10.3969/j.issn.1001-5078.2018.06.016
[14] XIAO Ruijiang, XU Minglong, SHAO Shubao, et al. Design and wide-bandwidth control of large aperture fast steering mirror with integrated-sensing unit[J]. Mechanical Systems and Signal Processing,2019,126:211-226.
[15] QU Zilian, ZHAO Qian, MENG Yonggang. Improvement of sensitivity of eddy current sensors for nano-scale thickness measurement of Cu films[J]. NDT & E International,2014,61:53-57.
[16] 刘学, 王艳林, 高宏, 等. 高精度电涡流传感器的标定研究[J]. 数字技术与应用,2019,37(1):80-81. LIU Xue, WANG Yanlin, GAO Hong, et al. Calibration of high precision eddy current sensor[J]. Digital Technology and Application,2019,37(1):80-81.
-
期刊类型引用(3)
1. 刘飞,太智超,张敏洁,相萌,于纯,邵晓鹏. 基于天塞主镜的多尺度长焦成像系统设计. 航空兵器. 2024(01): 111-116 .  百度学术
百度学术
2. 刘飞,吴晓琴,赵琳,段景博,李江勇,邵晓鹏. 广域高分辨率计算光学成像系统研究进展. 激光与光电子学进展. 2021(18): 10-35+438+3 . 百度学术
3. 郭智元,李建聪,陈太喜,伍雁雄. 单中心超广角手机镜头设计. 激光与光电子学进展. 2020(07): 277-283 . 百度学术
其他类型引用(6)











计量
- 文章访问数: 726
- HTML全文浏览量: 345
- PDF下载量: 81
- 被引次数: 9

 陕公网安备 61011302001501号
陕公网安备 61011302001501号 