
Horizontal alignment technology of coaxial three-mirror optical system
-
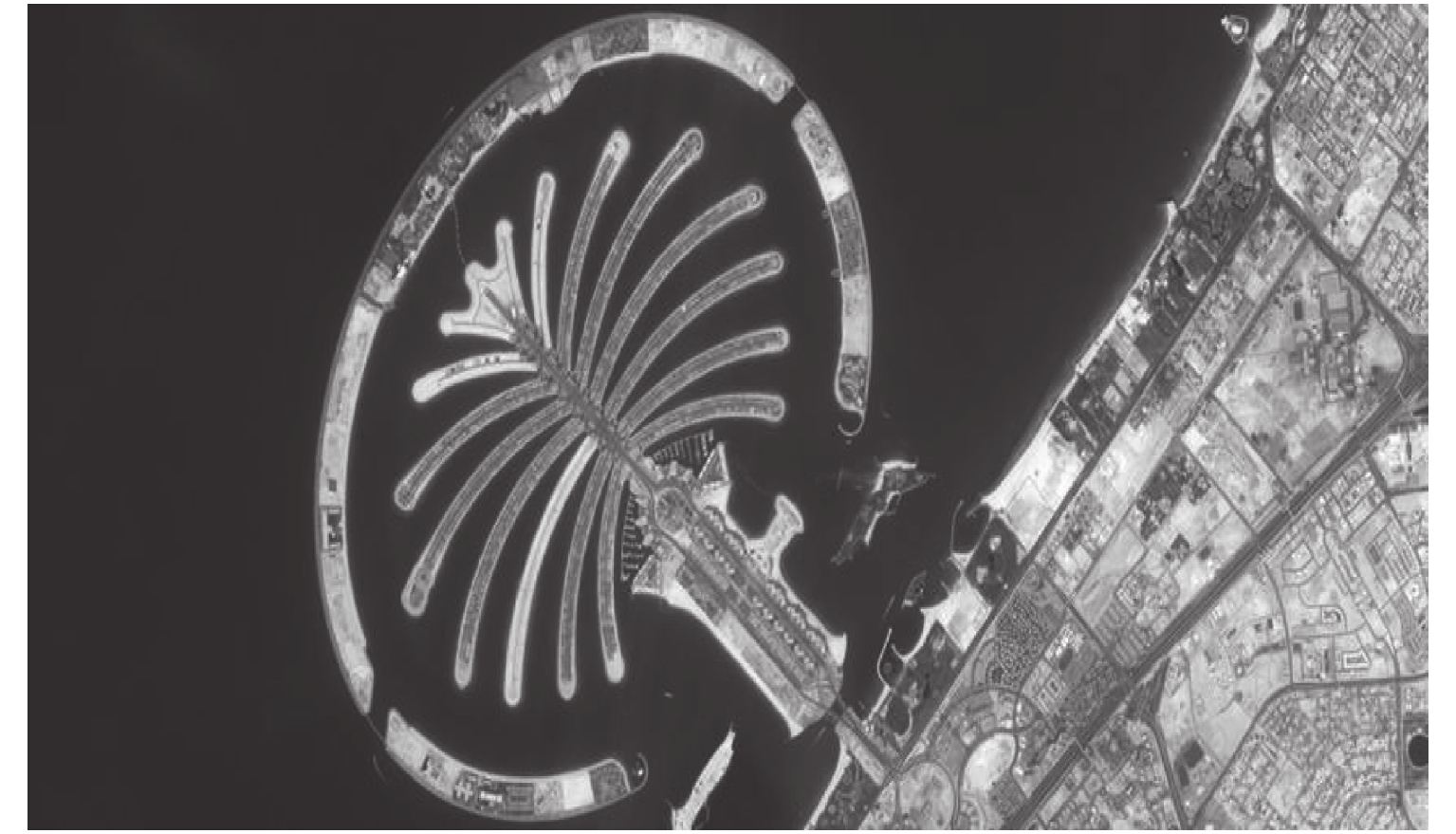
摘要: 共轴三反光学系统是空间光学遥感器常用的设计形式,以“高分一号”遥感卫星高分辨率相机装调为例,对共轴三反系统计算机辅助装调技术进行了研究。提出以主镜光轴为装调基准,通过调整三镜控制系统视场和调整次镜控制系统像差的装调方法,分析了次镜和三镜的失调量与Zernike系数变化关系,由光学设计软件求得系统灵敏度矩阵,用于指导系统装调工作,提高了装调精度,缩短了装调周期。测试结果表明:光学系统各视场Zernike系数优于0.05λ,系统波相差RMS值优于0.06λ,系统通过在轨成像测试,图像清晰,层次丰富。Abstract: Coaxial three-mirror optical system is a popular optical system design form in space optical remote sensor. Taking the alignment of high-resolution camera of the GF-1 sensing satellite as an example, the computer-aided alignment technology of coaxial three-mirror optical system was researched. The primary mirror optical axis was set as the benchmark. By adjusting the alignment methods of three-mirror control system field of view and secondary mirror control system aberration, the changes in the relationship between the misalignment rate of secondary mirror and three-mirror and Zernike coefficient were analyzed. The system sensitivity matrix was obtained by the optical design software to guide the system alignment, which improved the accuracy of alignment and shortened the period of alignment. Test results show that the Zernike coefficient of each field of view in optical system is better than 0.05λ, and the RMS value of system wave aberration is better than 0.06 λ. The system passes the on-orbit imaging test with clear and multilayer images.
-
引言
近些年来,光学投影测量物体三维形貌引起了人们的关注,因其非接触性、高精度、高速度等优点已被应用到很多领域[1]。光学投影测量技术主要依赖于投影条纹的生成,正弦条纹的生成对系统的测量精度有很大的影响。传统的投影方式是采用幻灯投影仪进行光栅投影[2],其测量的灵活性差且条纹空间密度较低。随着数字显示技术的发展,数字投影仪在光学三维轮廓测量系统中得到广泛应用。与光栅投影相比,数字投影仪可将任意周期、形状的条纹投射到被测物体表面。但是数字投影仪gamma[3]非线性效应会导致图像非正弦化,且难以产生高密度正弦条纹。光学三维形貌测量轮廓术中使用广泛的方法是傅里叶变换轮廓术(FTP)与相移轮廓术(PSP),但由于这两种方法最后得到的都只是包裹相位图[4],要想求解出真实相位分布则需要相位解包裹。目前,相位解包裹方法主要分为空间和时间相位解包裹两大类[5]。时间相位解包裹中基于双频外差原理的解包裹方法测量精度较高,发展速度很快;而传统双频相移解包裹技术要求两条纹的频差较小,且条纹节距比较大,使得其辨别形貌细节的能力降低,而且相移误差较大[6]。为了实现正弦条纹投射的自适应,提高相位解算精度,结合自适应光学中的波前控制与校正思想,引入波阵面调制技术[7]。通过相控阵调节两光束交会角度来得到所需的条纹频率,实现条纹投射的自适应,再将调制后双频应用到解包裹中来提高解相精度。两相干光束进行干涉形成的是明亮且对比度较高的正弦变化条纹,避免了数字投影的的正弦畸变,从而保证了光源的优质性。
1 测量系统及原理
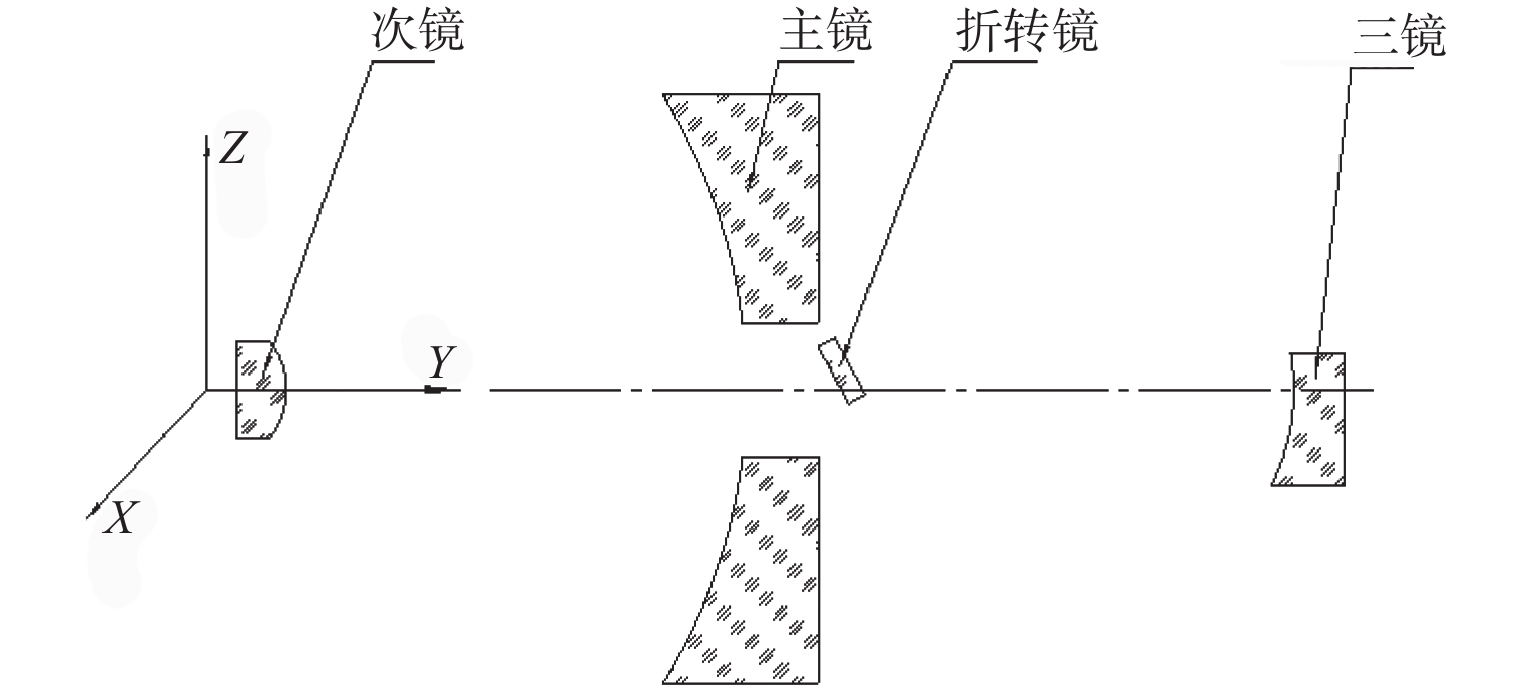
如图 1所示,He-Ne[8]激光器与分光棱镜垂直放置,从激光器输出的光束a通过分光棱镜后被分成b、c两光束,其中透射光束b先经过晶体增加光程后再入射到相控阵2,由相控阵2调节光束b的偏转角度θ2,同时反射光束c被平面镜反射后入射到相控阵1,由相控阵1调节光束c的偏转角度θ1,当θ1、θ2满足一定条件时,两束光在参考面O点处交会,产生干涉条纹。通过相控阵1、2调节两光束角度变化,产生所需的条纹空间频率。将被测物放置参考面上,采集放置被测物前后的基准条纹图和变形条纹图,将条纹图像通过傅里叶变换来得到包含被测物高度的包裹相位信息[9],采用双频解包裹进行相位展开,再经过系统标定后可以恢复被测物体三维形貌。
2 相控阵调节
一维光学相控阵结构如图 2所示,其相控阵由N个等距为d的阵元构成,平行光垂直射进相控阵元件,由相控阵进行调制可以使光束偏转θ0大小的角度[10],偏转以后光束的主瓣位置到达P点。
依据光学衍射原理,第n个阵元的光电场关系式可以写成:
$$ {E_n}\left( P \right) = {A_n}{{\rm{e}}^{ - {\rm{j}}n\Delta \varphi }} \cdot \frac{{{{\rm{e}}^{ - {\rm{j}}\frac{{2{\rm{ \mathsf{ π} }}}}{\lambda }{r_n}}}}}{{{r_n}}} $$ (1) 式中:An为第n个阵元入射光电场振幅;Δφ为相邻2个阵元之间的相位差;λ为入射光的波长(μm);rn为第n个阵元到观察点P之间的距离(μm)。
以平行光束入射,光电场的关系式可化简为
$$ E\left( \theta \right) = \sum\limits_{i = 0}^{N - 1} {{{\rm{e}}^{{\rm{j}}\left( {\frac{{2{\rm{ \mathsf{ π} }}}}{\lambda }nd\sin \theta - n\Delta \varphi } \right)}}} $$ (2) 式中:Δφ为相邻单元间的阵内相位差,表达式为$\Delta \varphi = \frac{{2{\rm{\pi }}}}{\lambda }d{\rm{sin}}{\theta _s}$;θs为光束扫描角度。
因为单缝因子会造成相关影响,故光强的表达式:
$$ \begin{array}{l} I'\left( \theta \right) = {N^2}\sin {c^2}\left( {\frac{{{\rm{ \mathsf{ π} }}a}}{\lambda }\sin \theta } \right) \cdot \\ \;\;\;\;\;\;\;\;\;\;\;\frac{{{{\sin }^2}\left[ {N\frac{{\rm{ \mathsf{ π} }}}{\lambda }d\left( {\sin \theta - \sin {\theta _s}} \right)} \right]}}{{{{\left( {N\frac{{\rm{ \mathsf{ π} }}}{\lambda }d} \right)}^2}{{\left( {\sin \theta - \sin {\theta _s}} \right)}^2}}} \end{array} $$ (3) 由(3)式可知,当θ0=θs时,在θ0方向上可以得到光强最大值,也是光束的主瓣,相控阵利用电光效应来控制光束偏转角度。
3 平行光交会干涉条纹间距的分析
如图 3所示,假设干涉条纹的零级亮纹中心是图 1中参考面上的O点,若P点是第L级亮纹的中心位置, 则第L级亮纹的中心位置与O点间的距离为
$$ x = \frac{{L\lambda }}{{\sin {\theta _1} - \sin {\theta _2}}} $$ (4) 干涉条纹间距:
$$ e = {x_{L + 1}} - {x_L} = \frac{\lambda }{{\sin {\theta _1} - \sin {\theta _2}}} $$ (5) 由(5)式可知,改变θ1、θ2的大小可以改变干涉条纹间距,调整投影条纹的空间频率。θ1与θ2和两束平行光产生干涉条纹的条纹间距之间的关系如图 4所示。
由图 4和(5)式可知,当θ1=θ2时,条纹间距为无穷大,当两角度差逐渐增大时,条纹间距从无穷大逐渐减小为0,由于系统中两角度的对称性,图中两角度与条纹间距的变化也是对称的。
为了方便理解,建立图 5所示的平行光束干涉模型。假设两束光在相控阵出射位置前经过的光程相等,光束b和c的光程差从光束射出位置N和M算起。相控阵与参考面垂直放置,相控阵1、2到光屏的距离MG与NH均为h。定义角度变化,逆时针偏转为正,顺时针偏转为负。
光束c、b分别经过相控阵1、2进行波前相位调制,使M和N点的相位相等。为了方便后面的计算,以M和N作为基准点进行讨论。光束c、b分别经相控阵1、2调节偏转至θ1、θ2,其最左侧光线的出射位置M、N到参考面O点的距离分别为$MO = \frac{h}{{\rm{cos}{\theta _1}}}, NO = \frac{h}{{\rm{cos}{\theta _2}}}$。初始状态为光线MO和NO在O点处相交,EB与FB在B点处相交,s为光束c、b横截面的直径长度。
1) 当θ1=-θ2时,光线MO和NO在O点处相交。由于MO=NO,在O点光程差为0,即O点是干涉条纹的零级亮纹中心位置。干涉条纹间距为
$$ {e_0} = \frac{\lambda }{{\sin {\theta _1} - \sin {\theta _2}}} = \frac{\lambda }{{\sin {\theta _1} - \sin \left( { - {\theta _1}} \right)}} = \frac{\lambda }{{2\sin {\theta _1}}} $$ (6) 2) 保持θ2不变,使光束c的偏转角度为θ′1。光线MA是由MO逆时针偏转θ0得到的,则θ′1=θ1+θ0,并且与b中的PA相交于点A。OA为光束c射到光屏上的光斑向右移动的距离,AB为光束偏转后新光斑直径。新光斑条纹间距为
$$ {e_1} = \frac{\lambda }{{\sin {{\theta '}_1} - \sin {\theta _2}}} = \frac{\lambda }{{\sin \left( {{\theta _1} + {\theta _0}} \right) + \sin {\theta _1}}} $$ (7) 由上式可知, 新光斑条纹间距较原光斑间距变小。
3) 保持θ2不变,当θ1顺时针偏转至θ″1时,同理得θ″1=θ1-θ′0。光斑向左移动的距离为OR,OK为光束偏转后新光斑直径。新光斑条纹间距为
$$ {e_2} = \frac{\lambda }{{\sin {{\theta ''}_1} - \sin {\theta _2}}} = \frac{\lambda }{{\sin \left( {{\theta _1} - {{\theta '}_0}} \right) + \sin {\theta _1}}} $$ (8) 由上式可知, 新光斑条纹间距较原光斑间距变大。
4) 保持两光束相交光斑大小不变,同时调节θ1、θ2使光斑大小不变,即OB=AC。新光斑条纹间距为
$$ {e_3} = \frac{\lambda }{{\sin {{\theta '}_1} - \sin {{\theta '}_2}}} = \frac{\lambda }{{\sin \left( {{\theta _1} + {\theta _0}} \right) - \sin \left( {{\theta _2} - {\theta _{02}}} \right)}} $$ (9) 由上式可知:新光斑条纹间距较原光斑间距变小,由于系统的对称性,在保持光斑大小不变的情况下,反方向移动条纹间距将变大。
以上分析了小角度范围内改变两光束夹角的4种情况,通过相控阵调节两光束夹角得到所需的条纹间距,为双频干涉投影还原物体三维形貌提供了技术支持。
4 双频外差解相原理
分别向被测物表面投射条纹间距为e1和e2的2种正弦条纹,其中e1<e2,对于被测物表面上某一点,其对应的条纹级数分别设为n1与n2 (包含小数部分),则有:
$$ {n_1}{e_1} = {n_2}{e_2} $$ (10) $$ \Delta {n_i} = \frac{{{\phi _i}}}{{2{\rm{ \mathsf{ π} }}}},\Delta {n_i} \in \left[ {0,1} \right),i = 1,2 $$ (11) $$ {n_i} = {N_i} + \Delta {n_i},{N_i} \in Z $$ (12) 式中:ϕi代表第i幅条纹的包裹相位;Ni代表条纹级数中的整数部分;Δni代表条纹级数中的小数部分[11]。由上式可得:
$$ {n_1} = \frac{{{e_2}\left( {{n_1} - {n_2}} \right)}}{{{e_2} - {e_1}}} = \frac{{{e_2}\left( {{N_1} - {N_2} + \Delta {n_1} - \Delta {n_2}} \right)}}{{{e_2} - {e_1}}} $$ (13) $$ {n_2} = \frac{{{e_1}\left( {{n_1} - {n_2}} \right)}}{{{e_2} - {e_1}}} = \frac{{{e_1}\left( {{N_1} - {N_2} + \Delta {n_1} - \Delta {n_2}} \right)}}{{{e_2} - {e_1}}} $$ (14) $$ {N_1} - {N_2} = \frac{{{e_2} - {e_1}}}{{{e_1}}}{n_2} + \Delta {n_2} - \Delta {n_1} $$ (15) 若使用条纹间距分别为e1和e2的2种不同条纹相互叠加时,将形成条纹间距为${e_{12}} = \frac{{{e_1}{e_2}}}{{{e_2} - {e_1}}}$的虚拟新条纹,根据文献[12]可知,求取解包裹相位φ1和φ2时由于乘以因子将误差放大,所以采用φi=2πNi+ϕi求解,其中Ni是整数级条纹,可通过对ni取整得到。则有关系式:
$$ {\varphi _1} = 2{\rm{ \mathsf{ π} }} \times {\rm{floor}}\left\{ {\frac{{{e_2}\left[ {\left( {{N_{12}} + \alpha } \right) + \frac{{{\phi _1} - {\phi _2}}}{{2{\rm{ \mathsf{ π} }}}}} \right]}}{{{e_2} - {e_1}}}} \right\} + {\phi _1} $$ (16) $$ {\varphi _2} = 2{\rm{ \mathsf{ π} }} \times {\rm{floor}}\left\{ {\frac{{{e_2}\left[ {\left( {{N_{12}} + \alpha } \right) + \frac{{{\phi _1} - {\phi _2}}}{{2{\rm{ \mathsf{ π} }}}}} \right]}}{{{e_2} - {e_1}}}} \right\} + {\phi _2} $$ (17) 选择合适的e1和e2,可使虚拟新条纹节距覆盖整个视场,此时N12=0,则可由上式计算出解包裹相位φ1和φ2[13]。
5 实验
根据图 1所示系统搭建实验光路。使用baumer(VLG-40C)分辨率为2 040×2 044像素的相机进行采集,通过相控阵控制两光束角度的偏转,调节两光束角度变化,分别产生条纹间距为l1=15 pixel、l2=25 pixel的干涉条纹,再分别投射到参考面及被测物表面,将采集的基准图及变形图传输到PC,进一步对图像进行处理,得到包裹相位主值,再根据传统单频傅里叶变换解包裹和双频解包裹分别进行展开,采用文献[14]提出的方法进行标定,图 6为还原被测物三维形貌的实验结果。
为了验证本文提出方法的有效性,分别在单频和双频解包裹条件下对一个最大高度为35.80 mm的物体进行恢复。图 6(a)为相控阵调节光束与参考面垂直方向的偏转角度θ1与θ2后,产生条纹间距为l1=15 pixel变形条纹图,(b)为条纹间距为l2=25变形条纹图。根据双频解相原理,合成后条纹间距为l12=37.5。(c)为使用传统单频傅里叶解包裹程序得出的解包裹相位图,(d)为使用双频解包裹程序得出的解包裹相位图。由解包裹后的对比相位图可知,单频去包裹后虽然可以看出被测物的大体轮廓,但是其轮廓并不光滑,而是在轮廓边缘处凹凸不平。使用双频去包裹后物体轮廓较为光滑,且在边缘处无凹凸现象。(e)为经标定后传统单频解包裹物体高度分布图,(f)为双频解包裹后物体高度分布图。对比(e)、(f)可知,使用传统单频方法虽然可以恢复被测物的三维轮廓,但是恢复精度不高,且(e)图中当y位于200像素位置处高度时恢复出现明显错误,经双频解包裹后的恢复图在y位于200像素处高度时恢复误差明显比单频小,而且被测物高度分布均匀,恢复效果较好。对于被测物最高点,其最大恢复高度分别为34.83 mm和35.22 mm,相对误差为2.7%和1.6%。可见解包裹后相位分布直接影响被测物最后高度恢复精度,在平行光干涉投影下,通过相控阵控制得到的双频去包裹形貌恢复情况,较普通单频恢复精度高。
6 结论
传统形貌测量多采用光栅投影,其投影条纹的非正弦性及条纹密度的限制将影响形貌测量的精度。为了提高恢复精度,采用平行光干涉投影避免了条纹的正弦畸变,保证了光源的优质性。结合自适应光学中的波前控制与校正思想,引入波阵面调制技术,通过相控阵调节两光束交会角度获得所需的条纹频率,实现条纹的可调性,再将调制后双频应用到解包裹中来提高解相精度。实验结果表明,在平行光干涉投影下,经波阵面调制后产生的条纹,在双频解包裹时被测物最高点恢复相对误差仅为1.6%,恢复效果好,精度高。
-
表 1 次镜灵敏度矩阵
Table 1 Secondary mirror sensitivity matrix
视场 $ {H}_{s} $=0.05 mm $ {D}_{sx} $=0.05 mm ${D}_{s{\textit{z}}}$=0.05 mm $ {R}_{sx} $=5″ ${R}_{s{\textit{z}}}$=5″ 中心场 ${Z} _{5}$ −0.011 4 0 0.0233 −0.008 9 0 ${Z} _{6}$ 0 −0.023 2 0 0 −0.008 9 ${Z} _{7}$ 0 −0.313 1 0 0 −0.019 9 ${Z} _{8}$ 0.009 3 0 −0.312 9 0.019 9 0 ${Z} _{9}$ 0.03 0 −0.000 2 0 0 +1视场 ${Z} _{5}$ 0.119 5 0.080 7 0.023 6 −0.008 9 0.029 1 ${Z} _{6}$ −0.076 −0.026 3 0.078 5 −0.028 9 −0.009 3 ${Z} _{7}$ −0.033 3 −0.310 7 −0.000 3 0.000 1 −0.019 8 ${Z} _{8}$ 0.010 4 −0.000 4 −0.311 8 0.02 0 ${Z} _{9}$ 0.03 0.000 5 0 0 0 −1视场 ${Z} _{5}$ 0.109 7 −0.080 7 0.023 6 −0.008 9 −0.029 1 ${Z} _{6}$ 0.076 −0.026 2 −0.078 5 0.028 9 −0.009 2 ${Z} _{7}$ 0.033 3 −0.310 7 0.000 3 −0.000 1 −0.019 9 ${Z} _{8}$ 0.010 4 0.000 4 −0.311 8 0.02 0 ${Z} _{9}$ 0.03 −0.000 5 0 0 0  下载: 导出CSV
下载: 导出CSV
表 2 三镜灵敏度矩阵
Table 2 Three-mirror sensitivity matrix
视场 $ {H}_{t} $=0.05 mm $ {D}_{tx} $=0.05 mm ${D}_{t{\textit{z}}}$=0.05 mm $ {R}_{tx} $=5″ ${R}_{t{\textit{z}}}$=5″ 中心场 ${Z} _{5}$ 0.004 7 −0.000 4 −0.000 5 0.002 6 −0.008 5 ${Z} _{6}$ −0.003 2 −0.000 9 0 0.008 4 0.002 7 ${Z} _{7}$ −0.004 4 0 −0.008 5 0.000 1 −0.000 6 ${Z} _{8}$ 0.001 4 −0.008 9 −0.000 1 0.000 7 0 ${Z} _{9}$ 0.000 3 0.000 1 −0 0 0 +1视场 $ {\mathrm{Z}}_{5} $ −0.000 5 −0.000 3 0 0.002 5 0 ${Z} _{6}$ 0 0 0.000 3 0 0.002 6 ${Z} _{7}$ 0 0 −0.008 7 0 −0.000 7 ${Z} _{8}$ 0.001 4 −0.008 6 0 0.000 7 0 ${Z} _{9}$ 0.000 3 0 0 0 0 −1视场 ${Z} _{5}$ 0.004 7 −0.000 4 0.000 6 0.002 6 0.008 5 ${Z} _{6}$ 0.003 2 0.000 9 0 −0.008 4 0.002 7 ${Z} _{7}$ 0.004 4 0 −0.008 6 −0.000 1 −0.000 7 ${Z} _{8}$ 0.001 4 −0.008 9 0 0.000 7 0 ${Z} _{9}$ 0.000 3 0.000 1 0.000 1 0 0
下载: 导出CSV
表 3 Zernike多项式
Table 3 Zernike polynomials
极坐标 像差 ${Z} _{5}$ ${\rho }^{2}\mathit{\rm{cos}}2\phi$ Astigmatism $ {0}^\circ $ or $ 90^\circ $ ${Z} _{6}$ ${\rho }^{2}\mathit{\rm{sin} }2\phi$ Astigmatism $ {45}^\circ $ ${Z} _{7}$ $\left(3{\rho }^{2}-2\right)\rho \mathit{\rm{cos}}\phi$ Coma X ${Z} _{8}$ $\left(3{\rho }^{2}-2\right)\mathit{\rho \rm{sin}}\phi$ Coma Y ${Z} _{9}$ $ 6{\rho }^{4}-6{\rho }^{2}+1 $ Primary spherical
下载: 导出CSV
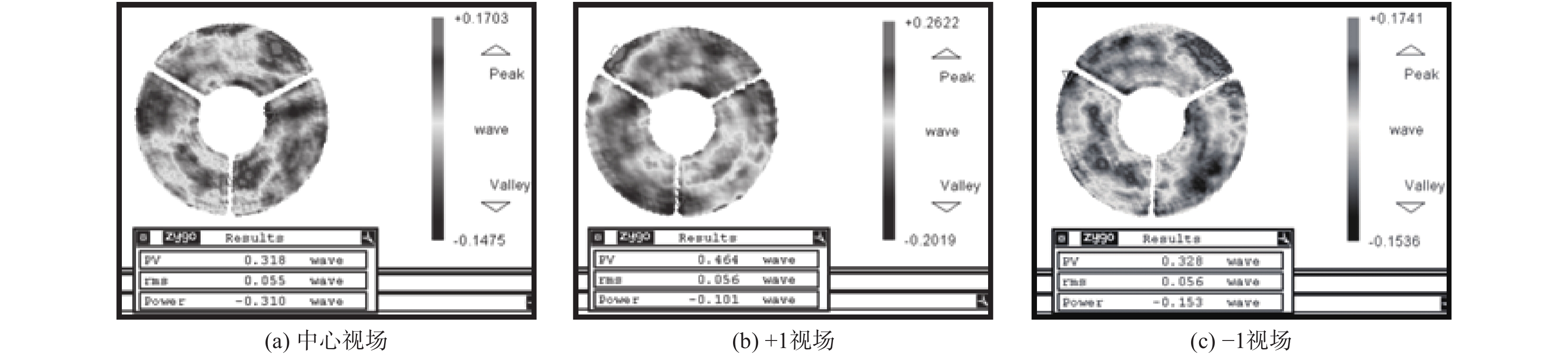
表 4 装调结果
Table 4 Alignment results
视场 ${Z}_{5}(\rm{\lambda })$ ${Z}_{6}(\rm{\lambda })$ ${Z}_{7}(\rm{\lambda })$ ${Z}_{8}(\rm{\lambda })$ ${Z}_{9}(\rm{\lambda })$ RMS$(\rm{\lambda })$ 0视场 −0.050 0.043 0.020 0.048 0.006 0.055 +1视场 −0.016 0.048 0.050 0.043 −0.009 0.056 −1视场 −0.009 −0.050 −0.047 0.034 0.013 0.056
下载: 导出CSV
-
[1] 刘波, 丁亚林, 贾继强, 等. R-C光学系统的计算机辅助装调[J]. 红外与激光工程,2016,45(3):0318001-1-6. LIU Bo, DING Yalin, JIA Jiqiang, et al. Computer aided alignment of R-C optical system[J]. Infrared and Laser Engineering,2016,45(3):0318001-1-6.
[2] 张向明, 姜峰, 孔龙阳, 等. 卡塞格林系统光学装调技术研究[J]. 应用光学,2015,36(4):526-530. doi: 10.5768/JAO201536.0401006 ZHANG Xiangming, JIANG Feng, KONG Longyang, et a1. Research on optical alignment technology for Cassegrain system[J]. Journal of Applied Optics,2015,36(4):526-530. doi: 10.5768/JAO201536.0401006
[3] 栗孟娟, 廖志波, 王春雨. 小口径高精度折射式光学系统装调公差的分析与控制[J]. 应用光学,2015,36(2):277-281. LI Mengjuan, LIAO Zhibo, WANG Chunyu. Analysis and control on assemblage tolerance in small-aperture high-precision refraction optical system[J]. Optics and Precision Engineering,2015,36(2):277-281.
[4] 李小燕, 付兴, 王鹏, 等. 非球面光学反射镜的装调方法[J]. 应用光学,2013,34(3):498-502. LI Xiaoyan, FU Xing, WANG Peng, et a1. Alignment method of aspheric optical reflector[J]. Journal of Applied Optics,2013,34(3):498-502.
[5] 金伟其, 王霞, 张其扬, 等. 多光轴一致性检测技术进展及其分析[J]. 红外与激光工程,2010,39(3):526-531. doi: 10.3969/j.issn.1007-2276.2010.03.031 JIN Weiqi, WANG Xia, ZHANG Qiyang, et a1. Technical progress and its analysis in detecting of multi-axes parallelism[J]. Infrared and Laser Engineering,2010,39(3):526-531. doi: 10.3969/j.issn.1007-2276.2010.03.031
[6] 潘君骅. 光学非球面的设计、加工与检测[M]. 苏州: 苏州大学出版社, 2004. PAN Junhua. The design manufacture and test of the aspherical optical surface[M]. Suzhou: Suzhou University Press, 2004.
[7] 安连生. 应用光学[M]. 北京: 北京理工大学出版社, 2003: 166-169. AN Liansheng. Applied optics[M]. Beijing: Beijing Institute of Technology Press, 2003: 166-169.
[8] 李斌, 陈佳夷, 王海超, 等. 椭球面反射镜的光轴引出方法[J]. 应用光学,2018,39(6):791-795. LI Bin, CHEN Jiayi, WANG Haichao, et al. Optical axis elicitation method for ellipsoidal mirror[J]. Journal of Applied Optics,2018,39(6):791-795.
[9] 宋俊儒, 邢辉, 穆生博, 等. 航空红外相机的装调[J]. 光学精密工程,2015,23(8):2125-2133. doi: 10.3788/OPE.20152308.2125 SONG Junru, XING Hui, MU Shengbo, et al. Alignment of aerial multi-angle infrared camera[J]. Optics and Precision Engineering,2015,23(8):2125-2133. doi: 10.3788/OPE.20152308.2125
[10] 岳丽清, 张继友. 三线阵相机视轴夹角及线阵平行性装调测试[J]. 航天返回与遥感,2012,33(3):35-40. doi: 10.3969/j.issn.1009-8518.2012.03.007 YUE Liqing, ZHANG Jiyou. Alignment method of axis angle and linear array parallelism for three-line array mapping camera[J]. Spacecraft Recovery and Remote Sensing,2012,33(3):35-40. doi: 10.3969/j.issn.1009-8518.2012.03.007
[11] 李旭阳, 李英才, 马臻. 折轴三反射光学系统的计算机辅助装调技术[J]. 应用光学,2009,30(6):901-906. LI Xuyang, LI Yingcai, MA Zhen. Computer-aided alignment method of coaxial three-mirror-anastigamat system[J]. Journal of Applied Optics,2009,30(6):901-906.
[12] 史广维, 张新, 张鹰, 等. 基于矢量波像差理论的两反光学系统装调研究[J]. 应用光学,2011,32(3):540-544. SHI Guangwei, ZHANG Xin, ZHANG Ying, et a1. Alignment of two-mirror optical system based on vector wavefront aberration[J]. Journal of Applied Optics,2011,32(3):540-544.
[13] 巩盾, 田铁印, 王红. 利用Zernike系数对离轴三反射系统进行计算机辅助装调[J]. 光学精密工程,2010,18(8):1754-1759. GONG Dun, TIAN Tieyin, WANG Hong. Computer-aided alignment of off-axis three-mirror system by Zernike coefficients[J]. Optic and Precision Engineering,2010,18(8):1754-1759.
[14] 张健, 张玲花, 刘立国, 等. 全景式航空遥感器TDICCD精密装调必要性分析及实现方法[J]. 中国光学,2014,7(6):996-1002. ZHANG Jian, ZHANG Linghua, LIU Liguo, et a1. Necessity and implement method of precise assembling of TDI CCD in sweep aerial remote sensor[J]. Chinese Optics,2014,7(6):996-1002.
[15] 刘磊, 李景林, 吕清涛. 大口径反射光学系统装调装置设计研究[J]. 光学精密工程,2005,13(z1):134-137. doi: 10.3321/j.issn:1004-924X.2005.z1.027 LIU Lei, LI Jinglin, LYU Qingtao. Research on adjusting device of large aperture reflective optics system[J]. Optics and Precision Engineering,2005,13(z1):134-137. doi: 10.3321/j.issn:1004-924X.2005.z1.027
-
期刊类型引用(5)
1. 刘伟光,张燕,肖应玉,李阳,张向明,杜萌,管伟,苏瑛,左晓舟,史永航. 离轴卡塞格林光学系统装调技术. 光学技术. 2024(01): 14-18 .  百度学术
百度学术
2. 杨海金,张平,郝芳,高雪军,卞臻臻,詹江,王新星,张鑫杰. 一种双曲面光学系统中次镜装调设计与实现. 应用光学. 2022(01): 131-136 . 本站查看
3. 左晓舟,王章利,赵金,苏瑛,杨海成,惠刚阳,刘伟光,王中强. 两镜反射系统自适应装调技术研究. 应用光学. 2022(04): 780-786 . 本站查看
4. 刘何伟,钱俊宏,马秀刚,张文博,周平,刘婷,陶冶,张蓉竹. 稀疏孔径望远系统的装调检测与模拟分析. 激光杂志. 2021(10): 31-36 . 百度学术
5. 刘彦,刘倩. 伺服机构动态装调技术研究. 科学技术创新. 2021(31): 13-15 . 百度学术
其他类型引用(2)








计量
- 文章访问数: 1668
- HTML全文浏览量: 612
- PDF下载量: 58
- 被引次数: 7
 陕公网安备 61011302001501号
陕公网安备 61011302001501号 